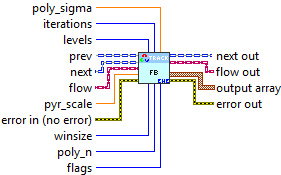
prev : first 8-bit single-channel input image.
next : second input image of the same size and the same type as ``prev``.
flow : computed flow image that has the same size as ``prev`` and type ``CV_32FC2``.
pyr_scale : parameter, specifying the image scale (<1) to build pyramids for each image; ``pyr_scale=0.5`` means a classical pyramid, where each next layer is twice smaller than the previous one.
levels : number of pyramid layers including the initial image; ``levels=1`` means that no extra layers are created and only the original images are used.
winsize : averaging window size; larger values increase the algorithm robustness to image noise and give more chances for fast motion detection, but yield more blurred motion field.
iterations : number of iterations the algorithm does at each pyramid level.
poly_n : size of the pixel neighborhood used to find polynomial expansion in each pixel; larger values mean that the image will be approximated with smoother surfaces, yielding more robust algorithm and more blurred motion field, typically ``poly_n`` =5 or 7.
poly_sigma : standard deviation of the Gaussian that is used to smooth derivatives used as a basis for the polynomial expansion; for ``poly_n=5``, you can set ``poly_sigma=1.1``, for ``poly_n=7``, a good value would be ``poly_sigma=1.5``.
flags : operation flags that can be a combination of the following:
* **OPTFLOW_USE_INITIAL_FLOW** uses the input ``flow`` as an initial flow approximation.
* **OPTFLOW_FARNEBACK_GAUSSIAN** uses the Gaussian :math:`\texttt{winsize}\times\texttt{winsize}` filter instead of a box filter of the same size for optical flow estimation; usually, this option gives z more accurate flow than with a box filter, at the cost of lower speed; normally, ``winsize`` for a Gaussian window should be set to a larger value to achieve the same level of robustness.
The function finds an optical flow for each ``prev`` pixel using the [Farneback2003]_ algorithm so that
.. math::
\texttt{prev} (y,x) \sim \texttt{next} ( y + \texttt{flow} (y,x)[1], x + \texttt{flow} (y,x)[0])
|
|
pyr_scale double |
|
|
levels int |
|
|
winsize int |
|
|
iterations int |
|
|
poly_n int |
|
|
poly_sigma double |
|
|
flags int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
prev |
|
|
next |
|
|
flow |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
next out |
|
|
output array |
|
|
|
|
|
|
|
|
flow out |
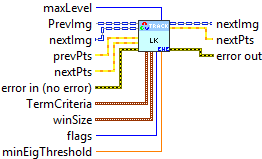
calcOpticalFlowPyrLK
prevImg : first 8-bit input image or pyramid constructed by :ocv:func:`buildOpticalFlowPyramid`.
nextImg : second input image or pyramid of the same size and the same type as ``prevImg``.
prevPts : vector of 2D points for which the flow needs to be found; point coordinates must be single-precision floating-point numbers.
nextPts : output vector of 2D points (with single-precision floating-point coordinates) containing the calculated new positions of input features in the second image; when ``OPTFLOW_USE_INITIAL_FLOW`` flag is passed, the vector must have the same size as in the input.
status : output status vector (of unsigned chars); each element of the vector is set to 1 if the flow for the corresponding features has been found, otherwise, it is set to 0.
err : output vector of errors; each element of the vector is set to an error for the corresponding feature, type of the error measure can be set in ``flags`` parameter; if the flow wasn't found then the error is not defined (use the ``status`` parameter to find such cases).
winSize : size of the search window at each pyramid level.
maxLevel : 0-based maximal pyramid level number; if set to 0, pyramids are not used (single level), if set to 1, two levels are used, and so on; if pyramids are passed to input then algorithm will use as many levels as pyramids have but no more than ``maxLevel``.
criteria : parameter, specifying the termination criteria of the iterative search algorithm (after the specified maximum number of iterations ``criteria.maxCount`` or when the search window moves by less than ``criteria.epsilon``.
flags : operation flags:
minEigThreshold : the algorithm calculates the minimum eigen value of a 2x2 normal matrix of optical flow equations (this matrix is called a spatial gradient matrix in [Bouguet00]_), divided by number of pixels in a window; if this value is less than ``minEigThreshold``, then a corresponding feature is filtered out and its flow is not processed, so it allows to remove bad points and get a performance boost.
The function implements a sparse iterative version of the Lucas-Kanade optical flow in pyramids. See [Bouguet00]_. The function is parallelized with the TBB library.
|
|
maxLevel int |
|
|
flags int |
|
|
minEigThreshold double |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
TermCriteria |
|
|
type |
|
|
maxCount |
|
|
epsilon |
|
|
winSize |
|
|
width |
|
|
height |
|
|
prevPts |
|
|
nextPts |
|
|
PrevImg |
|
|
nextImg |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
nextImg |
|
|
nextPts |
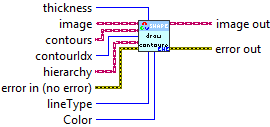
drawContours
----------------------------
Draws contours outlines or filled contours.
image : Destination image.
contours : All the input contours. Each contour is stored as a point vector.
contourIdx : Parameter indicating a contour to draw. If it is negative, all the contours are drawn.
color : Color of the contours.
thickness : Thickness of lines the contours are drawn with. If it is negative (for example, ``thickness=CV_FILLED`` ), the contour interiors are
drawn.
lineType : Line connectivity. See :ocv:func:`line` for details.
hierarchy : Optional information about hierarchy. It is only needed if you want to draw only some of the contours (see ``maxLevel`` ).
maxLevel : Maximal level for drawn contours. If it is 0, only
the specified contour is drawn. If it is 1, the function draws the contour(s) and all the nested contours. If it is 2, the function draws the contours, all the nested contours, all the nested-to-nested contours, and so on. This parameter is only taken into account when there is ``hierarchy`` available.
offset : Optional contour shift parameter. Shift all the drawn contours by the specified :math:`\texttt{offset}=(dx,dy)` .
contour : Pointer to the first contour.
externalColor : Color of external contours.
holeColor : Color of internal contours (holes).
The function draws contour outlines in the image if
:math:`\texttt{thickness} \ge 0` or fills the area bounded by the contours if
:math:`\texttt{thickness}<0` . The example below shows how to retrieve connected components from the binary image and label them: ::
#include "cv.h"
#include "highgui.h"
using namespace cv;
int main( int argc, char** argv )
{
Mat src;
// the first command-line parameter must be a filename of the binary
// (black-n-white) image
if( argc != 2 || !(src=imread(argv[1], 0)).data)
return -1;
Mat dst = Mat::zeros(src.rows, src.cols, CV_8UC3);
src = src > 1;
namedWindow( "Source", 1 );
imshow( "Source", src );
vector
vector
findContours( src, contours, hierarchy,
CV_RETR_CCOMP, CV_CHAIN_APPROX_SIMPLE );
// iterate through all the top-level contours,
// draw each connected component with its own random color
int idx = 0;
for( ; idx >= 0; idx = hierarchy[idx][0] )
{
Scalar color( rand()&255, rand()&255, rand()&255 );
drawContours( dst, contours, idx, color, CV_FILLED, 8, hierarchy );
}
namedWindow( "Components", 1 );
imshow( "Components", dst );
waitKey(0);
}
|
|
contourIdx int |
|
|
thickness int |
|
|
lineType int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
image |
|
|
contours |
|
|
Color |
|
|
hierarchy |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
image out |
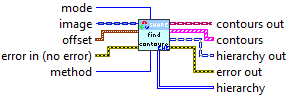
findContours
--------------------------
Finds contours in a binary image.
image : Source, an 8-bit single-channel image. Non-zero pixels are treated as 1's. Zero pixels remain 0's, so the image is treated as ``binary`` . You can use :ocv:func:`compare` , :ocv:func:`inRange` , :ocv:func:`threshold` , :ocv:func:`adaptiveThreshold` , :ocv:func:`Canny` , and others to create a binary image out of a grayscale or color one. The function modifies the ``image`` while extracting the contours.
contours : Detected contours. Each contour is stored as a vector of points.
hierarchy : Optional output vector, containing information about the image topology. It has as many elements as the number of contours. For each i-th contour ``contours[i]`` , the elements ``hierarchy[i][0]`` , ``hiearchy[i][1]`` , ``hiearchy[i][2]`` , and ``hiearchy[i][3]`` are set to 0-based indices in ``contours`` of the next and previous contours at the same hierarchical level, the first child contour and the parent contour, respectively. If for the contour ``i`` there are no next, previous, parent, or nested contours, the corresponding elements of ``hierarchy[i]`` will be negative.
mode : Contour retrieval mode (if you use Python see also a note below).
method : Contour approximation method (if you use Python see also a note below).
offset : Optional offset by which every contour point is shifted. This is useful if the contours are extracted from the image ROI and then they should be analyzed in the whole image context.
The function retrieves contours from the binary image using the algorithm
[Suzuki85]_. The contours are a useful tool for shape analysis and object detection and recognition. See ``squares.c`` in the OpenCV sample directory.
.. note:: Source ``image`` is modified by this function. Also, the function does not take into account 1-pixel border of the image (it's filled with 0's and used for neighbor analysis in the algorithm), therefore the contours touching the image border will be clipped.
.. note:: If you use the new Python interface then the ``CV_`` prefix has to be omitted in contour retrieval mode and contour approximation method parameters (for example, use ``cv2.RETR_LIST`` and ``cv2.CHAIN_APPROX_NONE`` parameters). If you use the old Python interface then these parameters have the ``CV_`` prefix (for example, use ``cv.CV_RETR_LIST`` and ``cv.CV_CHAIN_APPROX_NONE``).
|
|
mode int |
|
|
method int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
image |
|
|
offset |
|
|
X |
|
|
Y |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
contours |
|
|
|
|
|
|
|
|
x |
|
|
y |
|
|
hierarchy |
|
|
Numeric |
|
|
contours out |
|
|
hierarchy out |
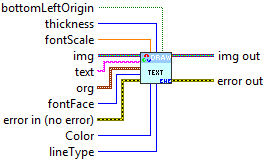
putText
-----------------------
Draws a text string.
img : Image.
text : Text string to be drawn.
org : Bottom-left corner of the text string in the image.
font : ``CvFont`` structure initialized using :ocv:cfunc:`InitFont`.
fontFace : Font type. One of ``FONT_HERSHEY_SIMPLEX``, ``FONT_HERSHEY_PLAIN``, ``FONT_HERSHEY_DUPLEX``, ``FONT_HERSHEY_COMPLEX``, ``FONT_HERSHEY_TRIPLEX``, ``FONT_HERSHEY_COMPLEX_SMALL``, ``FONT_HERSHEY_SCRIPT_SIMPLEX``, or ``FONT_HERSHEY_SCRIPT_COMPLEX``,
where each of the font ID's can be combined with ``FONT_HERSHEY_ITALIC`` to get the slanted letters.
fontScale : Font scale factor that is multiplied by the font-specific base size.
color : Text color.
thickness : Thickness of the lines used to draw a text.
lineType : Line type. See the ``line`` for details.
bottomLeftOrigin : When true, the image data origin is at the bottom-left corner. Otherwise, it is at the top-left corner.
The function ``putText`` renders the specified text string in the image.
Symbols that cannot be rendered using the specified font are
replaced by question marks. See
:ocv:func:`getTextSize` for a text rendering code example.
|
|
text int |
|
|
fontFace int |
|
|
fontScale double |
|
|
thickness int |
|
|
lineType int |
|
|
bottomLeftOrigin |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
img |
|
|
org |
|
|
X |
|
|
Y |
|
|
Color |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
img out |
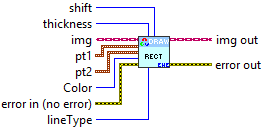
rectangle
-------------------
Draws a simple, thick, or filled up-right rectangle.
img : Image.
pt1 : Vertex of the rectangle.
pt2 : Vertex of the rectangle opposite to ``pt1`` .
rec : Alternative specification of the drawn rectangle.
color : Rectangle color or brightness (grayscale image).
thickness : Thickness of lines that make up the rectangle. Negative values, like ``CV_FILLED`` , mean that the function has to draw a filled rectangle.
lineType : Type of the line. See the :ocv:func:`line` description.
shift : Number of fractional bits in the point coordinates.
The function ``rectangle`` draws a rectangle outline or a filled rectangle whose two opposite corners are ``pt1`` and ``pt2``, or ``r.tl()`` and ``r.br()-Point(1,1)``.
|
|
thickness int |
|
|
lineType int |
|
|
shift int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
img |
|
|
pt1 |
|
|
X |
|
|
Y |
|
|
pt2 |
|
|
X |
|
|
Y |
|
|
Color |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
img out |
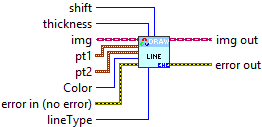
line
-----------------
Draws a line segment connecting two points.
img : Image.
pt1 : First point of the line segment.
pt2 : Second point of the line segment.
color : Line color.
thickness : Line thickness.
lineType : Type of the line:
shift : Number of fractional bits in the point coordinates.
The function ``line`` draws the line segment between ``pt1`` and ``pt2`` points in the image. The line is clipped by the image boundaries. For non-antialiased lines with integer coordinates, the 8-connected or 4-connected Bresenham algorithm is used. Thick lines are drawn with rounding endings.
Antialiased lines are drawn using Gaussian filtering. To specify the line color, you may use the macro ``CV_RGB(r, g, b)`` .
|
|
thickness int |
|
|
lineType int |
|
|
shift int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
img |
|
|
pt1 |
|
|
X |
|
|
Y |
|
|
pt2 |
|
|
X |
|
|
Y |
|
|
Color |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
img out |
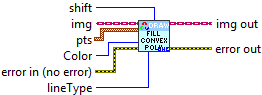
fillConvexPoly
------------------------
Fills a convex polygon.
img � Image.
pts � Polygon vertices.
npts � Number of polygon vertices.
color � Polygon color.
lineType � Type of the polygon boundaries. See the line() description.
shift � Number of fractional bits in the vertex coordinates.
The function fillConvexPoly draws a filled convex polygon. This function is much faster than the function fillPoly . It can fill not only convex polygons but any monotonic polygon without self-intersections, that is, a polygon whose contour intersects every horizontal line (scan line) twice at the most (though, its top-most and/or the bottom edge could be horizontal).
|
|
lineType int |
|
|
shift int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
img |
|
|
Color |
|
|
pts |
|
|
pt |
|
|
X |
|
|
Y |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
img out |
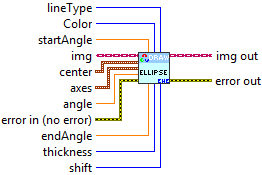
ellipse
------------------
Draws a simple or thick elliptic arc or fills an ellipse sector.
img : Image.
center : Center of the ellipse.
axes : Length of the ellipse axes.
angle : Ellipse rotation angle in degrees.
startAngle : Starting angle of the elliptic arc in degrees.
endAngle : Ending angle of the elliptic arc in degrees.
box : Alternative ellipse representation via :ocv:class:`RotatedRect` or ``CvBox2D``. This means that the function draws an ellipse inscribed in the rotated rectangle.
color : Ellipse color.
thickness : Thickness of the ellipse arc outline, if positive. Otherwise, this indicates that a filled ellipse sector is to be drawn.
lineType : Type of the ellipse boundary. See the :ocv:func:`line` description.
shift : Number of fractional bits in the coordinates of the center and values of axes.
The functions ``ellipse`` with less parameters draw an ellipse outline, a filled ellipse, an elliptic arc, or a filled ellipse sector.
A piecewise-linear curve is used to approximate the elliptic arc boundary. If you need more control of the ellipse rendering, you can retrieve the curve using
:ocv:func:`ellipse2Poly` and then render it with
:ocv:func:`polylines` or fill it with
:ocv:func:`fillPoly` . If you use the first variant of the function and want to draw the whole ellipse, not an arc, pass ``startAngle=0`` and ``endAngle=360`` . The figure below explains the meaning of the parameters.
**Figure 1. Parameters of Elliptic Arc**
.. image:: pics/ellipse.png
|
|
angle double |
|
|
startAngle double |
|
|
endAngle double |
|
|
thickness int |
|
|
lineType int |
|
|
shift int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
img |
|
|
center |
|
|
X |
|
|
Y |
|
|
axes |
|
|
width |
|
|
height |
|
|
Color |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
img out |
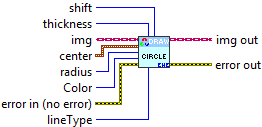
circle
img : Image where the circle is drawn.
center : Center of the circle.
radius : Radius of the circle.
color : Circle color.
thickness : Thickness of the circle outline, if positive. Negative thickness means that a filled circle is to be drawn.
lineType : Type of the circle boundary. See the :ocv:func:`line` description.
shift : Number of fractional bits in the coordinates of the center and in the radius value.
The function ``circle`` draws a simple or filled circle with a given center and radius.
|
|
radius int |
|
|
thickness int |
|
|
lineType int |
|
|
shift int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
img |
|
|
center |
|
|
X |
|
|
Y |
|
|
Color |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
img out |
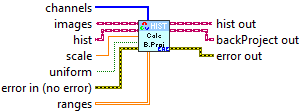
calcBackProject
images : Source arrays. They all should have the same depth, ``CV_8U`` or ``CV_32F`` , and the same size. Each of them can have an arbitrary number of channels.
nimages(set as 1) : Number of source images.
channels : The list of channels used to compute the back projection. The number of channels must match the histogram dimensionality. The first array channels are numerated from 0 to ``images[0].channels()-1`` , the second array channels are counted from ``images[0].channels()`` to ``images[0].channels() + images[1].channels()-1``, and so on.
hist : Input histogram that can be dense or sparse.
backProject : Destination back projection array that is a single-channel array of the same size and depth as ``images[0]`` .
ranges : Array of arrays of the histogram bin boundaries in each dimension. See :ocv:func:`calcHist` .
scale : Optional scale factor for the output back projection.
uniform : Flag indicating whether the histogram is uniform or not (see above).
The functions ``calcBackProject`` calculate the back project of the histogram. That is, similarly to ``calcHist`` , at each location ``(x, y)`` the function collects the values from the selected channels in the input images and finds the corresponding histogram bin. But instead of incrementing it, the function reads the bin value, scales it by ``scale`` , and stores in ``backProject(x,y)`` . In terms of statistics, the function computes probability of each element value in respect with the empirical probability distribution represented by the histogram. See how, for example, you can find and track a bright-colored object in a scene:
#.
Before tracking, show the object to the camera so that it covers almost the whole frame. Calculate a hue histogram. The histogram may have strong maximums, corresponding to the dominant colors in the object.
#.
When tracking, calculate a back projection of a hue plane of each input video frame using that pre-computed histogram. Threshold the back projection to suppress weak colors. It may also make sense to suppress pixels with non-sufficient color saturation and too dark or too bright pixels.
#.
Find connected components in the resulting picture and choose, for example, the largest component.
This is an approximate algorithm of the
:ocv:func:`CamShift` color object tracker.
.. seealso:: :ocv:func:`calcHist`
.. _compareHist:
|
|
scale double |
|
|
uniform |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
images |
|
|
channels int |
|
|
Numeric |
|
|
hist |
|
|
ranges float |
|
|
Numeric |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
hist out |
|
|
backProject out |
equalizeHist
src : Source 8-bit single channel image.
dst : Destination image of the same size and type as ``src`` .
The function equalizes the histogram of the input image using the following algorithm:
#.
Calculate the histogram
:math:`H` for ``src`` .
#.
Normalize the histogram so that the sum of histogram bins is 255.
#.
Compute the integral of the histogram:
.. math::
H'_i = \sum _{0 \le j < i} H(j)
#.
Transform the image using
:math:`H'` as a look-up table:
:math:`\texttt{dst}(x,y) = H'(\texttt{src}(x,y))`
The algorithm normalizes the brightness and increases the contrast of the image.
Extra Histogram Functions (C API)
---------------------------------
The rest of the section describes additional C functions operating on ``CvHistogram``.

|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
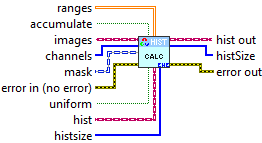
calcHist
nimages (set as 1) : Source arrays. They all should have the same depth, ``CV_8U`` or ``CV_32F`` , and the same size. Each of them can have an arbitrary number of channels.
images : Number of source images.
channels : List of the ``dims`` channels used to compute the histogram. The first array channels are numerated from 0 to ``images[0].channels()-1`` , the second array channels are counted from ``images[0].channels()`` to ``images[0].channels() + images[1].channels()-1``, and so on.
mask : Optional mask. If the matrix is not empty, it must be an 8-bit array of the same size as ``images[i]`` . The non-zero mask elements mark the array elements counted in the histogram.
hist : Output histogram, which is a dense or sparse ``dims`` -dimensional array.
dims : Histogram dimensionality that must be positive and not greater than ``CV_MAX_DIMS`` (equal to 32 in the current OpenCV version).
histSize : Array of histogram sizes in each dimension.
ranges : Array of the ``dims`` arrays of the histogram bin boundaries in each dimension. When the histogram is uniform ( ``uniform`` =true), then for each dimension ``i`` it is enough to specify the lower (inclusive) boundary :math:`L_0` of the 0-th histogram bin and the upper (exclusive) boundary :math:`U_{\texttt{histSize}[i]-1}` for the last histogram bin ``histSize[i]-1`` . That is, in case of a uniform histogram each of ``ranges[i]`` is an array of 2 elements. When the histogram is not uniform ( ``uniform=false`` ), then each of ``ranges[i]`` contains ``histSize[i]+1`` elements: :math:`L_0, U_0=L_1, U_1=L_2, ..., U_{\texttt{histSize[i]}-2}=L_{\texttt{histSize[i]}-1}, U_{\texttt{histSize[i]}-1}` . The array elements, that are not between :math:`L_0` and :math:`U_{\texttt{histSize[i]}-1}` , are not counted in the histogram.
uniform : Flag indicating whether the histogram is uniform or not (see above).
accumulate : Accumulation flag. If it is set, the histogram is not cleared in the beginning when it is allocated. This feature enables you to compute a single histogram from several sets of arrays, or to update the histogram in time.
The functions ``calcHist`` calculate the histogram of one or more
arrays. The elements of a tuple used to increment
a histogram bin are taken from the corresponding
input arrays at the same location. The sample below shows how to compute a 2D Hue-Saturation histogram for a color image. ::
#include
#include
using namespace cv;
int main( int argc, char** argv )
{
Mat src, hsv;
if( argc != 2 || !(src=imread(argv[1], 1)).data )
return -1;
cvtColor(src, hsv, CV_BGR2HSV);
// Quantize the hue to 30 levels
// and the saturation to 32 levels
int hbins = 30, sbins = 32;
int histSize[] = {hbins, sbins};
// hue varies from 0 to 179, see cvtColor
float hranges[] = { 0, 180 };
// saturation varies from 0 (black-gray-white) to
// 255 (pure spectrum color)
float sranges[] = { 0, 256 };
const float* ranges[] = { hranges, sranges };
MatND hist;
// we compute the histogram from the 0-th and 1-st channels
int channels[] = {0, 1};
calcHist( &hsv, 1, channels, Mat(), // do not use mask
hist, 2, histSize, ranges,
true, // the histogram is uniform
false );
double maxVal=0;
minMaxLoc(hist, 0, &maxVal, 0, 0);
int scale = 10;
Mat histImg = Mat::zeros(sbins*scale, hbins*10, CV_8UC3);
for( int h = 0; h < hbins; h++ )
for( int s = 0; s < sbins; s++ )
{
float binVal = hist.at
int intensity = cvRound(binVal*255/maxVal);
rectangle( histImg, Point(h*scale, s*scale),
Point( (h+1)*scale - 1, (s+1)*scale - 1),
Scalar::all(intensity),
CV_FILLED );
}
namedWindow( "Source", 1 );
imshow( "Source", src );
namedWindow( "H-S Histogram", 1 );
imshow( "H-S Histogram", histImg );
waitKey();
}
|
|
images |
|
|
channels int |
|
|
Numeric |
|
|
mask |
|
|
hist |
|
|
histsize int |
|
|
Numeric |
|
|
ranges float |
|
|
Numeric |
|
|
uniform |
|
|
accumulate |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
histSize |
|
|
|
|
hist out |
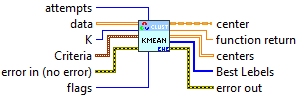
kmeans
------------------
Finds centers of clusters and groups input samples around the clusters.
samples � Floating-point matrix of input samples, one row per sample.
data � Data for clustering.
cluster_count � Number of clusters to split the set by.
K � Number of clusters to split the set by.
labels � Input/output integer array that stores the cluster indices for every sample.
criteria � The algorithm termination criteria, that is, the maximum number of iterations and/or the desired accuracy. The accuracy is specified as criteria.epsilon. As soon as each of the cluster centers moves by less than criteria.epsilon on some iteration, the algorithm stops.
termcrit � The algorithm termination criteria, that is, the maximum number of iterations and/or the desired accuracy.
attempts � Flag to specify the number of times the algorithm is executed using different initial labellings. The algorithm returns the labels that yield the best compactness (see the last function parameter).
rng � CvRNG state initialized by RNG().
flags �
Flag that can take the following values:
KMEANS_RANDOM_CENTERS Select random initial centers in each attempt.
KMEANS_PP_CENTERS Use kmeans++ center initialization by Arthur and Vassilvitskii [Arthur2007].
KMEANS_USE_INITIAL_LABELS During the first (and possibly the only) attempt, use the user-supplied labels instead of computing them from the initial centers. For the second and further attempts, use the random or semi-random centers. Use one of KMEANS_*_CENTERS flag to specify the exact method.
centers � Output matrix of the cluster centers, one row per each cluster center.
_centers � Output matrix of the cluster centers, one row per each cluster center.
compactness � The returned value that is described below.
The function kmeans implements a k-means algorithm that finds the centers of cluster_count clusters and groups the input samples around the clusters. As an output, \texttt{labels}_i contains a 0-based cluster index for the sample stored in the i^{th} row of the samples matrix.
The function returns the compactness measure that is computed as
\sum _i \| \texttt{samples} _i - \texttt{centers} _{ \texttt{labels} _i} \| ^2
after every attempt. The best (minimum) value is chosen and the corresponding labels and the compactness value are returned by the function. Basically, you can use only the core of the function, set the number of attempts to 1, initialize labels each time using a custom algorithm, pass them with the ( flags = KMEANS_USE_INITIAL_LABELS ) flag, and then choose the best (most-compact) clustering.
|
|
data |
|
|
Y |
|
|
K int |
|
|
attempts int |
|
|
flags int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Criteria |
|
|
type |
|
|
maxCount |
|
|
epsilon |
|
|
function return double |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
center |
|
|
centers |
|
|
Numeric |
|
|
Best Lebels |
|
|
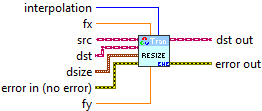
resize
-------------
Resizes an image.
src � input image.
dst� output image; it has the size dsize (when it is non-zero) or the size computed from src.size(), fx, and fy; the type of dst is the same as of src.
dsize �
output image size; if it equals zero, it is computed as:
\texttt{dsize = Size(round(fx*src.cols), round(fy*src.rows))}
Either dsize or both fx and fy must be non-zero.
fx �
scale factor along the horizontal axis; when it equals 0, it is computed as
\texttt{(double)dsize.width/src.cols}
fy �
scale factor along the vertical axis; when it equals 0, it is computed as
\texttt{(double)dsize.height/src.rows}
interpolation �
interpolation method:
INTER_NEAREST - a nearest-neighbor interpolation
INTER_LINEAR - a bilinear interpolation (used by default)
INTER_AREA - resampling using pixel area relation. It may be a preferred method for image decimation, as it gives moire�-free results. But when the image is zoomed, it is similar to the INTER_NEAREST method.
INTER_CUBIC - a bicubic interpolation over 4x4 pixel neighborhood
INTER_LANCZOS4 - a Lanczos interpolation over 8x8 pixel neighborhood
The function resize resizes the image src down to or up to the specified size. Note that the initial dst type or size are not taken into account. Instead, the size and type are derived from the src,``dsize``,``fx`` , and fy . If you want to resize src so that it fits the pre-created dst , you may call the function as follows:
// explicitly specify dsize=dst.size(); fx and fy will be computed from that.
resize(src, dst, dst.size(), 0, 0, interpolation);
If you want to decimate the image by factor of 2 in each direction, you can call the function this way:
// specify fx and fy and let the function compute the destination image size.
resize(src, dst, Size(), 0.5, 0.5, interpolation);
To shrink an image, it will generally look best with CV_INTER_AREA interpolation, whereas to enlarge an image, it will generally look best with CV_INTER_CUBIC (slow) or CV_INTER_LINEAR (faster but still looks OK).
|
|
fx double |
|
|
fy double |
|
|
interpolation int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
dsize |
|
|
width |
|
|
height |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
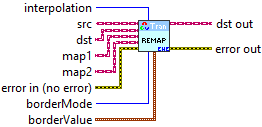
Remap
---------
Applies a generic geometrical transformation to an image.
src � Source image.
dst � Destination image. It has the same size as map1 and the same type as src .
map1 � The first map of either (x,y) points or just x values having the type CV_16SC2 , CV_32FC1 , or CV_32FC2 . See convertMaps() for details on converting a floating point representation to fixed-point for speed.
map2 � The second map of y values having the type CV_16UC1 , CV_32FC1 , or none (empty map if map1 is (x,y) points), respectively.
interpolation � Interpolation method (see resize() ). The method INTER_AREA is not supported by this function.
borderMode � Pixel extrapolation method (see borderInterpolate() ). When borderMode=BORDER_TRANSPARENT , it means that the pixels in the destination image that corresponds to the �outliers� in the source image are not modified by the function.
borderValue � Value used in case of a constant border. By default, it is 0.
The function remap transforms the source image using the specified map:
dest(x,y) = src(map_x(x,y),may_y(x,y))
where values of pixels with non-integer coordinates are computed using one of available interpolation methods. map_x and map_y can be encoded as separate floating-point maps in map_1 and map_2 respectively, or interleaved floating-point maps of (x,y) in map_1 , or fixed-point maps created by using convertMaps() . The reason you might want to convert from floating to fixed-point representations of a map is that they can yield much faster (~2x) remapping operations. In the converted case, map_1 contains pairs (cvFloor(x), cvFloor(y)) and map_2 contains indices in a table of interpolation coefficients.
This function cannot operate in-place.
|
|
interpolation int |
|
|
borderMode int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
map1 |
|
|
map2 |
|
|
borderValue |
|
|
v0 double |
|
|
v1 double |
|
|
v2 double |
|
|
v3 double |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
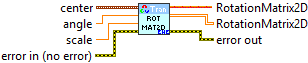
getRotationMatrix2D
center : Center of the rotation in the source image.
angle : Rotation angle in degrees. Positive values mean counter-clockwise rotation (the coordinate origin is assumed to be the top-left corner).
scale : Isotropic scale factor.
map_matrix : The output affine transformation, 2x3 floating-point matrix.
The function calculates the following matrix:
.. math::
\begin{bmatrix} \alpha & \beta & (1- \alpha ) \cdot \texttt{center.x} - \beta \cdot \texttt{center.y} \\ - \beta & \alpha & \beta \cdot \texttt{center.x} + (1- \alpha ) \cdot \texttt{center.y} \end{bmatrix}
where
.. math::
\begin{array}{l} \alpha = \texttt{scale} \cdot \cos \texttt{angle} , \\ \beta = \texttt{scale} \cdot \sin \texttt{angle} \end{array}
The transformation maps the rotation center to itself. If this is not the target, adjust the shift.
.. seealso::
:ocv:func:`getAffineTransform`,
:ocv:func:`warpAffine`,
:ocv:func:`transform`
|
|
angle double |
|
|
scale double |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
center |
|
|
X |
|
|
Y |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
RotationMatrix2D |
|
|
RotationMatrix2D |
|
|
Numeric |
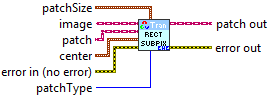
getRectSubPix
------------------------------
Retrieves a pixel rectangle from an image with sub-pixel accuracy.
src(image) : Source image.
patchSize : Size of the extracted patch.
center : Floating point coordinates of the center of the extracted rectangle within the source image. The center must be inside the image.
dst : Extracted patch that has the size ``patchSize`` and the same number of channels as ``src`` .
patchType : Depth of the extracted pixels. By default, they have the same depth as ``src`` .
The function ``getRectSubPix`` extracts pixels from ``src`` :
.. math::
dst(x, y) = src(x + \texttt{center.x} - ( \texttt{dst.cols} -1)*0.5, y + \texttt{center.y} - ( \texttt{dst.rows} -1)*0.5)
where the values of the pixels at non-integer coordinates are retrieved
using bilinear interpolation. Every channel of multi-channel
images is processed independently. While the center of the rectangle
must be inside the image, parts of the rectangle may be
outside. In this case, the replication border mode (see
:ocv:func:`borderInterpolate` ) is used to extrapolate
the pixel values outside of the image.
.. seealso::
:ocv:func:`warpAffine`,
:ocv:func:`warpPerspective`
|
|
patch |
|
|
patchType |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
image |
|
|
center |
|
|
X |
|
|
Y |
|
|
patchSize |
|
|
width |
|
|
height |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
patch out |
getPerspectiveTransform
src : Coordinates of quadrangle vertices in the source image.
dst : Coordinates of the corresponding quadrangle vertices in the destination image.
The function calculates the :math:`3 \times 3` matrix of a perspective transform so that:
.. math::
\begin{bmatrix} t_i x'_i \\ t_i y'_i \\ t_i \end{bmatrix} = \texttt{map\_matrix} \cdot \begin{bmatrix} x_i \\ y_i \\ 1 \end{bmatrix}
where
.. math::
dst(i)=(x'_i,y'_i),
src(i)=(x_i, y_i),
i=0,1,2,3
.. seealso::
:ocv:func:`findHomography`,
:ocv:func:`warpPerspective`,
:ocv:func:`perspectiveTransform`
![OpenCV.lvlib:getPerspectiveTransform[Points].vi](image/OpenCV.lvlib_getPerspectiveTransform[Points]c.png)
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
Point |
|
|
X |
|
|
Y |
|
|
dst |
|
|
Point |
|
|
X |
|
|
Y |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
value |
|
|
Numeric |
|
|
OpenCV.lvlib:Double Matrix.lvclass |
getPerspectiveTransform
src : Coordinates of quadrangle vertices in the source image.
dst : Coordinates of the corresponding quadrangle vertices in the destination image.
The function calculates the :math:`3 \times 3` matrix of a perspective transform so that:
.. math::
\begin{bmatrix} t_i x'_i \\ t_i y'_i \\ t_i \end{bmatrix} = \texttt{map\_matrix} \cdot \begin{bmatrix} x_i \\ y_i \\ 1 \end{bmatrix}
where
.. math::
dst(i)=(x'_i,y'_i),
src(i)=(x_i, y_i),
i=0,1,2,3
.. seealso::
:ocv:func:`findHomography`,
:ocv:func:`warpPerspective`,
:ocv:func:`perspectiveTransform`
![OpenCV.lvlib:getPerspectiveTransform[Matrix].vi](image/OpenCV.lvlib_getPerspectiveTransform[Matrix]c.png)
|
|
dst |
|
|
Y |
|
|
src |
|
|
Y |
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
value |
|
|
Numeric |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
PerspectiveTransform |
getPerspectiveTransform
src : Coordinates of quadrangle vertices in the source image.
dst : Coordinates of the corresponding quadrangle vertices in the destination image.
The function calculates the :math:`3 \times 3` matrix of a perspective transform so that:
.. math::
\begin{bmatrix} t_i x'_i \\ t_i y'_i \\ t_i \end{bmatrix} = \texttt{map\_matrix} \cdot \begin{bmatrix} x_i \\ y_i \\ 1 \end{bmatrix}
where
.. math::
dst(i)=(x'_i,y'_i),
src(i)=(x_i, y_i),
i=0,1,2,3
.. seealso::
:ocv:func:`findHomography`,
:ocv:func:`warpPerspective`,
:ocv:func:`perspectiveTransform`
![OpenCV.lvlib:getPerspectiveTransform[Mat].vi](image/OpenCV.lvlib_getPerspectiveTransform[Mat]c.png)
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
PerspectiveTransform |
getPerspectiveTransform
-----------------------------
Calculates a perspective transform from four pairs of the corresponding points.
src : Coordinates of quadrangle vertices in the source image.
dst : Coordinates of the corresponding quadrangle vertices in the destination image.
The function calculates the :math:`3 \times 3` matrix of a perspective transform so that:
.. math::
\begin{bmatrix} t_i x'_i \\ t_i y'_i \\ t_i \end{bmatrix} = \texttt{map\_matrix} \cdot \begin{bmatrix} x_i \\ y_i \\ 1 \end{bmatrix}
where
.. math::
dst(i)=(x'_i,y'_i),
src(i)=(x_i, y_i),
i=0,1,2,3
.. seealso::
:ocv:func:`findHomography`,
:ocv:func:`warpPerspective`,
:ocv:func:`perspectiveTransform`

warpPerspective
src : input image.
dst : output image that has the size ``dsize`` and the same type as ``src`` .
M : :math:`3\times 3` transformation matrix.
dsize : size of the output image.
flags : combination of interpolation methods (``INTER_LINEAR`` or ``INTER_NEAREST``) and the optional flag ``WARP_INVERSE_MAP``, that sets ``M`` as the inverse transformation ( :math:`\texttt{dst}\rightarrow\texttt{src}` ).
borderMode : pixel extrapolation method (``BORDER_CONSTANT`` or ``BORDER_REPLICATE``).
borderValue : value used in case of a constant border; by default, it equals 0.
The function ``warpPerspective`` transforms the source image using the specified matrix:
.. math::
\texttt{dst} (x,y) = \texttt{src} \left ( \frac{M_{11} x + M_{12} y + M_{13}}{M_{31} x + M_{32} y + M_{33}} ,
\frac{M_{21} x + M_{22} y + M_{23}}{M_{31} x + M_{32} y + M_{33}} \right )
when the flag ``WARP_INVERSE_MAP`` is set. Otherwise, the transformation is first inverted with
:ocv:func:`invert` and then put in the formula above instead of ``M`` .
The function cannot operate in-place.
.. seealso::
:ocv:func:`warpAffine`,
:ocv:func:`resize`,
:ocv:func:`remap`,
:ocv:func:`getRectSubPix`,
:ocv:func:`perspectiveTransform`
![OpenCV.lvlib:warpPerspective[Matrix].vi](image/OpenCV.lvlib_warpPerspective[Matrix]c.png)
|
|
flags int |
|
|
borderMode int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
dsize |
|
|
width |
|
|
height |
|
|
borderValue |
|
|
v0 double |
|
|
v1 double |
|
|
v2 double |
|
|
v3 double |
|
|
M |
|
|
Numeric |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
warpPerspective
src : input image.
dst : output image that has the size ``dsize`` and the same type as ``src`` .
M : :math:`3\times 3` transformation matrix.
dsize : size of the output image.
flags : combination of interpolation methods (``INTER_LINEAR`` or ``INTER_NEAREST``) and the optional flag ``WARP_INVERSE_MAP``, that sets ``M`` as the inverse transformation ( :math:`\texttt{dst}\rightarrow\texttt{src}` ).
borderMode : pixel extrapolation method (``BORDER_CONSTANT`` or ``BORDER_REPLICATE``).
borderValue : value used in case of a constant border; by default, it equals 0.
The function ``warpPerspective`` transforms the source image using the specified matrix:
.. math::
\texttt{dst} (x,y) = \texttt{src} \left ( \frac{M_{11} x + M_{12} y + M_{13}}{M_{31} x + M_{32} y + M_{33}} ,
\frac{M_{21} x + M_{22} y + M_{23}}{M_{31} x + M_{32} y + M_{33}} \right )
when the flag ``WARP_INVERSE_MAP`` is set. Otherwise, the transformation is first inverted with
:ocv:func:`invert` and then put in the formula above instead of ``M`` .
The function cannot operate in-place.
.. seealso::
:ocv:func:`warpAffine`,
:ocv:func:`resize`,
:ocv:func:`remap`,
:ocv:func:`getRectSubPix`,
:ocv:func:`perspectiveTransform`
![OpenCV.lvlib:warpPerspective[Mat].vi](image/OpenCV.lvlib_warpPerspective[Mat]c.png)
|
|
flags int |
|
|
borderMode int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
M |
|
|
dsize |
|
|
width |
|
|
height |
|
|
borderValue |
|
|
v0 double |
|
|
v1 double |
|
|
v2 double |
|
|
v3 double |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
warpPerspective
src : input image.
dst : output image that has the size ``dsize`` and the same type as ``src`` .
M : :math:`3\times 3` transformation matrix.
dsize : size of the output image.
flags : combination of interpolation methods (``INTER_LINEAR`` or ``INTER_NEAREST``) and the optional flag ``WARP_INVERSE_MAP``, that sets ``M`` as the inverse transformation ( :math:`\texttt{dst}\rightarrow\texttt{src}` ).
borderMode : pixel extrapolation method (``BORDER_CONSTANT`` or ``BORDER_REPLICATE``).
borderValue : value used in case of a constant border; by default, it equals 0.
The function ``warpPerspective`` transforms the source image using the specified matrix:
.. math::
\texttt{dst} (x,y) = \texttt{src} \left ( \frac{M_{11} x + M_{12} y + M_{13}}{M_{31} x + M_{32} y + M_{33}} ,
\frac{M_{21} x + M_{22} y + M_{23}}{M_{31} x + M_{32} y + M_{33}} \right )
when the flag ``WARP_INVERSE_MAP`` is set. Otherwise, the transformation is first inverted with
:ocv:func:`invert` and then put in the formula above instead of ``M`` .
The function cannot operate in-place.
.. seealso::
:ocv:func:`warpAffine`,
:ocv:func:`resize`,
:ocv:func:`remap`,
:ocv:func:`getRectSubPix`,
:ocv:func:`perspectiveTransform`
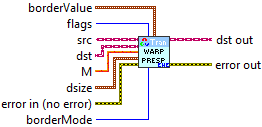
getAffineTransform
src : Coordinates of triangle vertices in the source image.
dst : Coordinates of the corresponding triangle vertices in the destination image.
The function calculates the :math:`2 \times 3` matrix of an affine transform so that:
.. math::
\begin{bmatrix} x'_i \\ y'_i \end{bmatrix} = \texttt{map\_matrix} \cdot \begin{bmatrix} x_i \\ y_i \\ 1 \end{bmatrix}
where
.. math::
dst(i)=(x'_i,y'_i),
src(i)=(x_i, y_i),
i=0,1,2
.. seealso::
:ocv:func:`warpAffine`,
:ocv:func:`transform`
![OpenCV.lvlib:getAffineTransform[Pointes].vi](image/OpenCV.lvlib_getAffineTransform[Pointes]c.png)
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
Point |
|
|
X |
|
|
Y |
|
|
dst |
|
|
Point |
|
|
X |
|
|
Y |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
AffineTransform matrix |
|
|
Numeric |
|
|
AffineTransform |
getAffineTransform
src : Coordinates of triangle vertices in the source image.
dst : Coordinates of the corresponding triangle vertices in the destination image.
The function calculates the :math:`2 \times 3` matrix of an affine transform so that:
.. math::
\begin{bmatrix} x'_i \\ y'_i \end{bmatrix} = \texttt{map\_matrix} \cdot \begin{bmatrix} x_i \\ y_i \\ 1 \end{bmatrix}
where
.. math::
dst(i)=(x'_i,y'_i),
src(i)=(x_i, y_i),
i=0,1,2
.. seealso::
:ocv:func:`warpAffine`,
:ocv:func:`transform`
![OpenCV.lvlib:getAffineTransform[Mat].vi](image/OpenCV.lvlib_getAffineTransform[Mat]c.png)
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst |
|
|
Y |
|
|
src |
|
|
Y |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
AffineTransform matrix |
|
|
Numeric |
|
|
AffineTransform |
getAffineTransform
src : Coordinates of triangle vertices in the source image.
dst : Coordinates of the corresponding triangle vertices in the destination image.
The function calculates the :math:`2 \times 3` matrix of an affine transform so that:
.. math::
\begin{bmatrix} x'_i \\ y'_i \end{bmatrix} = \texttt{map\_matrix} \cdot \begin{bmatrix} x_i \\ y_i \\ 1 \end{bmatrix}
where
.. math::
dst(i)=(x'_i,y'_i),
src(i)=(x_i, y_i),
i=0,1,2
.. seealso::
:ocv:func:`warpAffine`,
:ocv:func:`transform`

warpAffine
src : input image.
dst : output image that has the size ``dsize`` and the same type as ``src`` .
M : :math:`2\times 3` transformation matrix.
dsize : size of the output image.
flags : combination of interpolation methods (see :ocv:func:`resize` ) and the optional flag ``WARP_INVERSE_MAP`` that means that ``M`` is the inverse transformation ( :math:`\texttt{dst}\rightarrow\texttt{src}` ).
borderMode : pixel extrapolation method (see :ocv:func:`borderInterpolate`); when \ ``borderMode=BORDER_TRANSPARENT`` , it means that the pixels in the destination image corresponding to the "outliers" in the source image are not modified by the function.
borderValue : value used in case of a constant border; by default, it is 0.
The function ``warpAffine`` transforms the source image using the specified matrix:
.. math::
\texttt{dst} (x,y) = \texttt{src} ( \texttt{M} _{11} x + \texttt{M} _{12} y + \texttt{M} _{13}, \texttt{M} _{21} x + \texttt{M} _{22} y + \texttt{M} _{23})
when the flag ``WARP_INVERSE_MAP`` is set. Otherwise, the transformation is first inverted with
:ocv:func:`invertAffineTransform` and then put in the formula above instead of ``M`` .
The function cannot operate in-place.
.. seealso::
:ocv:func:`warpPerspective`,
:ocv:func:`resize`,
:ocv:func:`remap`,
:ocv:func:`getRectSubPix`,
:ocv:func:`transform`
.. note:: ``cvGetQuadrangleSubPix`` is similar to ``cvWarpAffine``, but the outliers are extrapolated using replication border mode.
![OpenCV.lvlib:warpAffine[Mat].vi](image/OpenCV.lvlib_warpAffine[Mat]c.png)
|
|
flags int |
|
|
borderMode int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
M |
|
|
dsize |
|
|
width |
|
|
height |
|
|
borderValue |
|
|
v0 double |
|
|
v1 double |
|
|
v2 double |
|
|
v3 double |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
warpAffine
src : input image.
dst : output image that has the size ``dsize`` and the same type as ``src`` .
M : :math:`2\times 3` transformation matrix.
dsize : size of the output image.
flags : combination of interpolation methods (see :ocv:func:`resize` ) and the optional flag ``WARP_INVERSE_MAP`` that means that ``M`` is the inverse transformation ( :math:`\texttt{dst}\rightarrow\texttt{src}` ).
borderMode : pixel extrapolation method (see :ocv:func:`borderInterpolate`); when \ ``borderMode=BORDER_TRANSPARENT`` , it means that the pixels in the destination image corresponding to the "outliers" in the source image are not modified by the function.
borderValue : value used in case of a constant border; by default, it is 0.
The function ``warpAffine`` transforms the source image using the specified matrix:
.. math::
\texttt{dst} (x,y) = \texttt{src} ( \texttt{M} _{11} x + \texttt{M} _{12} y + \texttt{M} _{13}, \texttt{M} _{21} x + \texttt{M} _{22} y + \texttt{M} _{23})
when the flag ``WARP_INVERSE_MAP`` is set. Otherwise, the transformation is first inverted with
:ocv:func:`invertAffineTransform` and then put in the formula above instead of ``M`` .
The function cannot operate in-place.
.. seealso::
:ocv:func:`warpPerspective`,
:ocv:func:`resize`,
:ocv:func:`remap`,
:ocv:func:`getRectSubPix`,
:ocv:func:`transform`
.. note:: ``cvGetQuadrangleSubPix`` is similar to ``cvWarpAffine``, but the outliers are extrapolated using replication border mode.
![OpenCV.lvlib:warpAffine[Matrix].vi](image/OpenCV.lvlib_warpAffine[Matrix]c.png)
|
|
flags int |
|
|
borderMode int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
dsize |
|
|
width |
|
|
height |
|
|
borderValue |
|
|
v0 double |
|
|
v1 double |
|
|
v2 double |
|
|
v3 double |
|
|
M |
|
|
Numeric |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
warpAffine
-----------------------
Applies an affine transformation to an image.
src : input image.
dst : output image that has the size ``dsize`` and the same type as ``src`` .
M : :math:`2\times 3` transformation matrix.
dsize : size of the output image.
flags : combination of interpolation methods (see :ocv:func:`resize` ) and the optional flag ``WARP_INVERSE_MAP`` that means that ``M`` is the inverse transformation ( :math:`\texttt{dst}\rightarrow\texttt{src}` ).
borderMode : pixel extrapolation method (see :ocv:func:`borderInterpolate`); when \ ``borderMode=BORDER_TRANSPARENT`` , it means that the pixels in the destination image corresponding to the "outliers" in the source image are not modified by the function.
borderValue : value used in case of a constant border; by default, it is 0.
The function ``warpAffine`` transforms the source image using the specified matrix:
.. math::
\texttt{dst} (x,y) = \texttt{src} ( \texttt{M} _{11} x + \texttt{M} _{12} y + \texttt{M} _{13}, \texttt{M} _{21} x + \texttt{M} _{22} y + \texttt{M} _{23})
when the flag ``WARP_INVERSE_MAP`` is set. Otherwise, the transformation is first inverted with
:ocv:func:`invertAffineTransform` and then put in the formula above instead of ``M`` .
The function cannot operate in-place.
.. seealso::
:ocv:func:`warpPerspective`,
:ocv:func:`resize`,
:ocv:func:`remap`,
:ocv:func:`getRectSubPix`,
:ocv:func:`transform`
.. note:: ``cvGetQuadrangleSubPix`` is similar to ``cvWarpAffine``, but the outliers are extrapolated using replication border mode.
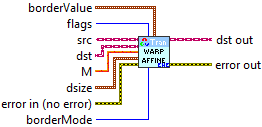
VideoCapture
class:: VideoCapture
Class for video capturing from video files or cameras.
The class provides C++ API for capturing video from cameras or for reading video files. Here is how the class can be used: ::
#include "opencv2/opencv.hpp"
using namespace cv;
int main(int, char**)
{
VideoCapture cap(0); // open the default camera
if(!cap.isOpened()) // check if we succeeded
return -1;
Mat edges;
namedWindow("edges",1);
for(;;)
{
Mat frame;
cap >> frame; // get a new frame from camera
cvtColor(frame, edges, CV_BGR2GRAY);
GaussianBlur(edges, edges, Size(7,7), 1.5, 1.5);
Canny(edges, edges, 0, 30, 3);
imshow("edges", edges);
if(waitKey(30) >= 0) break;
}
// the camera will be deinitialized automatically in VideoCapture destructor
return 0;
}
.. note:: In C API the black-box structure ``CvCapture`` is used instead of ``VideoCapture``.

|
|
filename |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
VideoCapture |
VideoCapture::open
---------------------
Open video file or a capturing device for video capturing
The methods/functions combine VideoCapture::grab() and VideoCapture::retrieve() in one call. This is the most convenient method for reading video files or capturing data from decode and return the just grabbed frame. If no frames has been grabbed (camera has been disconnected, or there are no more frames in video file), the methods return false and the functions return NULL pointer.

|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
videoCaptureRead |
|
|
image |
|
|
function return |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
videoCaptureRead |
|
|
image |
imwrite
------------------
Saves an image to a specified file.
filename(path) : Name of the file.
image(img) : Image to be saved
params : Format-specific save parameters encoded as pairs ``paramId_1, paramValue_1, paramId_2, paramValue_2, ...`` . The following parameters are currently supported:
* For JPEG, it can be a quality ( ``CV_IMWRITE_JPEG_QUALITY`` ) from 0 to 100 (the higher is the better). Default value is 95.
* For PNG, it can be the compression level ( ``CV_IMWRITE_PNG_COMPRESSION`` ) from 0 to 9. A higher value means a smaller size and longer compression time. Default value is 3.
* For PPM, PGM, or PBM, it can be a binary format flag ( ``CV_IMWRITE_PXM_BINARY`` ), 0 or 1. Default value is 1.
The function ``imwrite`` saves the image to the specified file. The image format is chosen based on the ``filename`` extension (see
:ocv:func:`imread` for the list of extensions). Only 8-bit (or 16-bit unsigned (``CV_16U``) in case of PNG, JPEG 2000, and TIFF) single-channel or 3-channel (with 'BGR' channel order) images can be saved using this function. If the format, depth or channel order is different, use
:ocv:func:`Mat::convertTo` , and
:ocv:func:`cvtColor` to convert it before saving. Or, use the universal XML I/O functions to save the image to XML or YAML format.
It is possible to store PNG images with an alpha channel using this function. To do this, create 8-bit (or 16-bit) 4-channel image BGRA, where the alpha channel goes last. Fully transparent pixels should have alpha set to 0, fully opaque pixels should have alpha set to 255/65535. The sample below shows how to create such a BGRA image and store to PNG file. It also demonstrates how to set custom compression parameters ::
#include
#include
#include
using namespace cv;
using namespace std;
void createAlphaMat(Mat &mat)
{
for (int i = 0; i < mat.rows; ++i) {
for (int j = 0; j < mat.cols; ++j) {
Vec4b& rgba = mat.at
rgba[0] = UCHAR_MAX;
rgba[1] = saturate_cast
rgba[2] = saturate_cast
rgba[3] = saturate_cast
}
}
}
int main(int argv, char **argc)
{
// Create mat with alpha channel
Mat mat(480, 640, CV_8UC4);
createAlphaMat(mat);
vector
compression_params.push_back(CV_IMWRITE_PNG_COMPRESSION);
compression_params.push_back(9);
try {
imwrite("alpha.png", mat, compression_params);
}
catch (runtime_error& ex) {
fprintf(stderr, "Exception converting image to PNG format: %s\n", ex.what());
return 1;
}
fprintf(stdout, "Saved PNG file with alpha data.\n");
return 0;
}

|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
img |
|
|
path |
|
|
params |
|
|
Cluster |
|
|
Ring |
|
|
val |
|
|
function return |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
imread
------
Loads an image from a file.
filename(path): Name of file to be loaded.
flags: Flags specifying the color type of a loaded image:
* CV_LOAD_IMAGE_ANYDEPTH - If set, return 16-bit/32-bit image when the input has the corresponding depth, otherwise convert it to 8-bit.
* CV_LOAD_IMAGE_COLOR - If set, always convert image to the color one
* CV_LOAD_IMAGE_GRAYSCALE - If set, always convert image to the grayscale one
* **>0** Return a 3-channel color image.
.. note:: In the current implementation the alpha channel, if any, is stripped from the output image. Use negative value if you need the alpha channel.
* **=0** Return a grayscale image.
* **<0** Return the loaded image as is (with alpha channel).
The function ``imread`` loads an image from the specified file and returns it. If the image cannot be read (because of missing file, improper permissions, unsupported or invalid format), the function returns an empty matrix ( ``Mat::data==NULL`` ). Currently, the following file formats are supported:
* Windows bitmaps - ``*.bmp, *.dib`` (always supported)
* JPEG files - ``*.jpeg, *.jpg, *.jpe`` (see the *Notes* section)
* JPEG 2000 files - ``*.jp2`` (see the *Notes* section)
* Portable Network Graphics - ``*.png`` (see the *Notes* section)
* Portable image format - ``*.pbm, *.pgm, *.ppm`` (always supported)
* Sun rasters - ``*.sr, *.ras`` (always supported)
* TIFF files - ``*.tiff, *.tif`` (see the *Notes* section)
.. note::
* The function determines the type of an image by the content, not by the file extension.
* On Microsoft Windows* OS and MacOSX*, the codecs shipped with an OpenCV image (libjpeg, libpng, libtiff, and libjasper) are used by default. So, OpenCV can always read JPEGs, PNGs, and TIFFs. On MacOSX, there is also an option to use native MacOSX image readers. But beware that currently these native image loaders give images with different pixel values because of the color management embedded into MacOSX.
* On Linux*, BSD flavors and other Unix-like open-source operating systems, OpenCV looks for codecs supplied with an OS image. Install the relevant packages (do not forget the development files, for example, "libjpeg-dev", in Debian* and Ubuntu*) to get the codec support or turn on the ``OPENCV_BUILD_3RDPARTY_LIBS`` flag in CMake.
.. note:: In the case of color images, the decoded images will have the channels stored in ``B G R`` order.
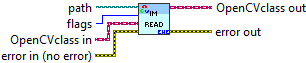
|
|
flags int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
path |
|
|
OpenCVclass in |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
OpenCVclass out |
HoughLinesP
---------------------
Finds line segments in a binary image using the probabilistic Hough transform.
image � 8-bit, single-channel binary source image. The image may be modified by the function.
lines � Output vector of lines. Each line is represented by a 4-element vector (x_1, y_1, x_2, y_2) , where (x_1,y_1) and (x_2, y_2) are the ending points of each detected line segment.
rho � Distance resolution of the accumulator in pixels.
theta � Angle resolution of the accumulator in radians.
threshold � Accumulator threshold parameter. Only those lines are returned that get enough votes ( >\texttt{threshold} ).
minLineLength � Minimum line length. Line segments shorter than that are rejected.
maxLineGap � Maximum allowed gap between points on the same line to link them.
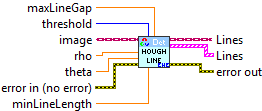
|
|
rho double |
|
|
theta double |
|
|
threshold int |
|
|
minLineLength double |
|
|
maxLineGap double |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
image |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Lines |
|
|
Lines |
|
|
|
|
Point |
|
|
x1 |
|
|
y1 |
|
|
Point 2 |
|
|
x2 |
|
|
y2 |
HoughLines
-------------------
Finds lines in a binary image using the standard Hough transform.
image : 8-bit, single-channel binary source image. The image may be modified by the function.
lines : Output vector of lines. Each line is represented by a two-element vector :math:`(\rho, \theta)` . :math:`\rho` is the distance from the coordinate origin :math:`(0,0)` (top-left corner of the image). :math:`\theta` is the line rotation angle in radians ( :math:`0 \sim \textrm{vertical line}, \pi/2 \sim \textrm{horizontal line}` ).
rho : Distance resolution of the accumulator in pixels.
theta : Angle resolution of the accumulator in radians.
threshold : Accumulator threshold parameter. Only those lines are returned that get enough votes ( :math:`>\texttt{threshold}` ).
srn : For the multi-scale Hough transform, it is a divisor for the distance resolution ``rho`` . The coarse accumulator distance resolution is ``rho`` and the accurate accumulator resolution is ``rho/srn`` . If both ``srn=0`` and ``stn=0`` , the classical Hough transform is used. Otherwise, both these parameters should be positive.
stn : For the multi-scale Hough transform, it is a divisor for the distance resolution ``theta``.
method : One of the following Hough transform variants:
* CV_HOUGH_STANDARD classical or standard Hough transform. Every line is represented by two floating-point numbers (\rho, \theta) , where \rho is a distance between (0,0) point and the line, and \theta is the angle between x-axis and the normal to the line. Thus, the matrix must be (the created sequence will be) of CV_32FC2 type
* CV_HOUGH_PROBABILISTIC probabilistic Hough transform (more efficient in case if the picture contains a few long linear segments). It returns line segments rather than the whole line. Each segment is represented by starting and ending points, and the matrix must be (the created sequence will be) of the CV_32SC4 type.
* CV_HOUGH_MULTI_SCALE multi-scale variant of the classical Hough transform. The lines are encoded the same way as CV_HOUGH_STANDARD.
param1 : First method-dependent parameter:
* For the classical Hough transform, it is not used (0).
* For the probabilistic Hough transform, it is the minimum line length.
* For the multi-scale Hough transform, it is srn.
param2 : Second method-dependent parameter:
* For the classical Hough transform, it is not used (0).
* For the probabilistic Hough transform, it is the maximum gap between line segments lying on the same line to treat them as a single line segment (that is, to join them).
* For the multi-scale Hough transform, it is ``stn``.
The function implements the standard or standard multi-scale Hough transform algorithm for line detection. See http://homepages.inf.ed.ac.uk/rbf/HIPR2/hough.htm for a good explanation of Hough transform.
See also the example in :ocv:func:`HoughLinesP` description.
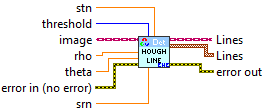
|
|
rho double |
|
|
theta double |
|
|
threshold int |
|
|
srn double |
|
|
stn double |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
image |
|
|
Lines |
|
|
Lines |
|
|
Point |
|
|
distance |
|
|
angle |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
HoughCircles
image : 8-bit, single-channel, grayscale input image.
circles : Output vector of found circles. Each vector is encoded as a 3-element floating-point vector :math:`(x, y, radius)`.
method : Detection method to use. Currently, the only implemented method is ``CV_HOUGH_GRADIENT`` , which is basically *21HT* , described in [Yuen90]_.
dp : Inverse ratio of the accumulator resolution to the image resolution. For example, if ``dp=1`` , the accumulator has the same resolution as the input image. If ``dp=2`` , the accumulator has half as big width and height.
minDist : Minimum distance between the centers of the detected circles. If the parameter is too small, multiple neighbor circles may be falsely detected in addition to a true one. If it is too large, some circles may be missed.
param1 : First method-specific parameter. In case of ``CV_HOUGH_GRADIENT`` , it is the higher threshold of the two passed to the :ocv:func:`Canny` edge detector (the lower one is twice smaller).
param2 : Second method-specific parameter. In case of ``CV_HOUGH_GRADIENT`` , it is the accumulator threshold for the circle centers at the detection stage. The smaller it is, the more false circles may be detected. Circles, corresponding to the larger accumulator values, will be returned first.
minRadius : Minimum circle radius.
maxRadius : Maximum circle radius.
The function finds circles in a grayscale image using a modification of the Hough transform.
Example: ::
#include
#include
#include
using namespace cv;
int main(int argc, char** argv)
{
Mat img, gray;
if( argc != 2 && !(img=imread(argv[1], 1)).data)
return -1;
cvtColor(img, gray, CV_BGR2GRAY);
// smooth it, otherwise a lot of false circles may be detected
GaussianBlur( gray, gray, Size(9, 9), 2, 2 );
vector
HoughCircles(gray, circles, CV_HOUGH_GRADIENT,
2, gray->rows/4, 200, 100 );
for( size_t i = 0; i < circles.size(); i++ )
{
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
// draw the circle center
circle( img, center, 3, Scalar(0,255,0), -1, 8, 0 );
// draw the circle outline
circle( img, center, radius, Scalar(0,0,255), 3, 8, 0 );
}
namedWindow( "circles", 1 );
imshow( "circles", img );
return 0;
}
.. note:: Usually the function detects the centers of circles well. However, it may fail to find correct radii. You can assist to the function by specifying the radius range ( ``minRadius`` and ``maxRadius`` ) if you know it. Or, you may ignore the returned radius, use only the center, and find the correct radius using an additional procedure.
.. seealso::
:ocv:func:`fitEllipse`,
:ocv:func:`minEnclosingCircle`
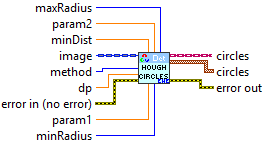
|
|
method int |
|
|
dp double |
|
|
minDist double |
|
|
param1 double |
|
|
param2 double |
|
|
minRadius int |
|
|
maxRadius int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
image |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
circles |
|
|
circles |
|
|
Point |
|
|
X |
|
|
Y |
|
|
radius |
goodFeaturesToTrack
image : Input 8-bit or floating-point 32-bit, single-channel image.
corners : Output vector of detected corners.
maxCorners : Maximum number of corners to return. If there are more corners than are found, the strongest of them is returned.
qualityLevel : Parameter characterizing the minimal accepted quality of image corners. The parameter value is multiplied by the best corner quality measure, which is the minimal eigenvalue (see :ocv:func:`cornerMinEigenVal` ) or the Harris function response (see :ocv:func:`cornerHarris` ). The corners with the quality measure less than the product are rejected. For example, if the best corner has the quality measure = 1500, and the ``qualityLevel=0.01`` , then all the corners with the quality measure less than 15 are rejected.
minDistance : Minimum possible Euclidean distance between the returned corners.
mask : Optional region of interest. If the image is not empty (it needs to have the type ``CV_8UC1`` and the same size as ``image`` ), it specifies the region in which the corners are detected.
blockSize : Size of an average block for computing a derivative covariation matrix over each pixel neighborhood. See :ocv:func:`cornerEigenValsAndVecs` .
useHarrisDetector : Parameter indicating whether to use a Harris detector (see :ocv:func:`cornerHarris`) or :ocv:func:`cornerMinEigenVal`.
k : Free parameter of the Harris detector.
The function finds the most prominent corners in the image or in the specified image region, as described in [Shi94]_:
#.
Function calculates the corner quality measure at every source image pixel using the
:ocv:func:`cornerMinEigenVal` or
:ocv:func:`cornerHarris` .
#.
Function performs a non-maximum suppression (the local maximums in *3 x 3* neighborhood are retained).
#.
The corners with the minimal eigenvalue less than
:math:`\texttt{qualityLevel} \cdot \max_{x,y} qualityMeasureMap(x,y)` are rejected.
#.
The remaining corners are sorted by the quality measure in the descending order.
#.
Function throws away each corner for which there is a stronger corner at a distance less than ``maxDistance``.
The function can be used to initialize a point-based tracker of an object.
.. note:: If the function is called with different values ``A`` and ``B`` of the parameter ``qualityLevel`` , and ``A`` > {B}, the vector of returned corners with ``qualityLevel=A`` will be the prefix of the output vector with ``qualityLevel=B`` .
.. seealso::
:ocv:func:`cornerMinEigenVal`,
:ocv:func:`cornerHarris`,
:ocv:func:`calcOpticalFlowPyrLK`,
:ocv:func:`estimateRigidTransform`,
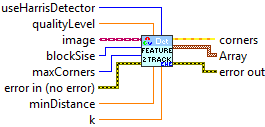
|
|
image |
|
|
maxCorners int |
|
|
qualityLevel double |
|
|
minDistance double |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
k |
|
|
useHarrisDetector |
|
|
blockSise |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Array |
|
|
Point |
|
|
X |
|
|
Y |
|
|
corners |
cornerSubPix
Refines the corner locations.
image : Input image.
corners : Initial coordinates of the input corners and refined coordinates provided for output.
winSize(size) : Half of the side length of the search window. For example, if ``winSize=Size(5,5)`` , then a :math:`5*2+1 \times 5*2+1 = 11 \times 11` search window is used.
zeroZone : Half of the size of the dead region in the middle of the search zone over which the summation in the formula below is not done. It is used sometimes to avoid possible singularities of the autocorrelation matrix. The value of (-1,-1) indicates that there is no such a size.
criteria(TermCriteria): Criteria for termination of the iterative process of corner refinement. That is, the process of corner position refinement stops either after ``criteria.maxCount`` iterations or when the corner position moves by less than ``criteria.epsilon`` on some iteration.
The function iterates to find the sub-pixel accurate location of corners or radial saddle points, as shown on the figure below.
.. image:: pics/cornersubpix.png
Sub-pixel accurate corner locator is based on the observation that every vector from the center
:math:`q` to a point
:math:`p` located within a neighborhood of
:math:`q` is orthogonal to the image gradient at
:math:`p` subject to image and measurement noise. Consider the expression:
.. math::
\epsilon _i = {DI_{p_i}}^T \cdot (q - p_i)
where
:math:`{DI_{p_i}}` is an image gradient at one of the points
:math:`p_i` in a neighborhood of
:math:`q` . The value of
:math:`q` is to be found so that
:math:`\epsilon_i` is minimized. A system of equations may be set up with
:math:`\epsilon_i` set to zero:
.. math::
\sum _i(DI_{p_i} \cdot {DI_{p_i}}^T) - \sum _i(DI_{p_i} \cdot {DI_{p_i}}^T \cdot p_i)
where the gradients are summed within a neighborhood ("search window") of
:math:`q` . Calling the first gradient term
:math:`G` and the second gradient term
:math:`b` gives:
.. math::
q = G^{-1} \cdot b
The algorithm sets the center of the neighborhood window at this new center
:math:`q` and then iterates until the center stays within a set threshold.
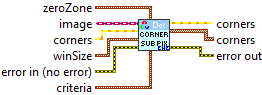
|
|
image |
|
|
corners |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
winSize |
|
|
width |
|
|
height |
|
|
criteria |
|
|
type |
|
|
maxCount |
|
|
epsilon |
|
|
zeroZone |
|
|
width |
|
|
height |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
corners |
|
|
Point |
|
|
X |
|
|
Y |
|
|
corners |
cornerMinEigenVal
-----------------
Calculates the minimal eigenvalue of gradient matrices for corner detection.
src: Input single-channel 8-bit or floating-point image.
dst: Image to store the minimal eigenvalues. It has the type ``CV_32FC1`` and the same size as ``src`` .
blockSize: Neighborhood size (see the details on :ocv:func:`cornerEigenValsAndVecs` ).
ksize: Aperture parameter for the :ocv:func:`Sobel` operator.
borderType: Pixel extrapolation method. See :ocv:func:`borderInterpolate` .
The function is similar to cornerEigenValsAndVecs() but it calculates and stores only the minimal eigenvalue of the covariance matrix of derivatives, that is, \min(\lambda_1, \lambda_2) in terms of the formulae in the cornerEigenValsAndVecs() description.
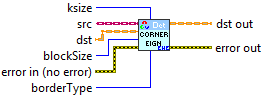
|
|
blockSize int |
|
|
ksize int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
borderType int |
|
|
src |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
cornerHarris
src : Input single-channel 8-bit or floating-point image.
dst : Image to store the Harris detector responses. It has the type ``CV_32FC1`` and the same size as ``src`` .
blockSize : Neighborhood size (see the details on :ocv:func:`cornerEigenValsAndVecs` ).
ksize : Aperture parameter for the :ocv:func:`Sobel` operator.
k : Harris detector free parameter. See the formula below.
borderType : Pixel extrapolation method. See :ocv:func:`borderInterpolate` .
The function runs the Harris edge detector on the image. Similarly to `cornerMinEigenVal` and `cornerEigenValsAndVecs` , for each pixel (x, y) it calculates a 2x2 gradient covariance matrix M^{(x,y)} over a blockSize x blockSize neighborhood. Then, it computes the following characteristic:
dst (x,y) = det M^{(x,y)} - k * (tr M^{(x,y)})^2
Corners in the image can be found as the local maxima of this response map.
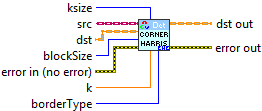
|
|
blockSize int |
|
|
ksize int |
|
|
k double |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
borderType int |
|
|
src |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
cornerEigenValsAndVecs
Calculates eigenvalues and eigenvectors of image blocks for corner detection.
src : Input single-channel 8-bit or floating-point image.
dst : Image to store the results. It has the same size as ``src`` and the type ``CV_32FC(6)`` .
blockSize : Neighborhood size (see details below).
ksize : Aperture parameter for the :ocv:func:`Sobel` operator.
borderType : Pixel extrapolation method. See :ocv:func:`borderInterpolate` .
For every pixel
:math:`p` , the function ``cornerEigenValsAndVecs`` considers a ``blockSize`` :math:`\times` ``blockSize`` neighborhood
:math:`S(p)` . It calculates the covariation matrix of derivatives over the neighborhood as:
.. math::
M = \begin{bmatrix} \sum _{S(p)}(dI/dx)^2 & \sum _{S(p)}(dI/dx dI/dy)^2 \\ \sum _{S(p)}(dI/dx dI/dy)^2 & \sum _{S(p)}(dI/dy)^2 \end{bmatrix}
where the derivatives are computed using the
:ocv:func:`Sobel` operator.
After that, it finds eigenvectors and eigenvalues of
:math:`M` and stores them in the destination image as
:math:`(\lambda_1, \lambda_2, x_1, y_1, x_2, y_2)` where
* :math:`\lambda_1, \lambda_2` are the non-sorted eigenvalues of :math:`M`
* :math:`x_1, y_1` are the eigenvectors corresponding to :math:`\lambda_1`
* :math:`x_2, y_2` are the eigenvectors corresponding to :math:`\lambda_2`
The output of the function can be used for robust edge or corner detection.
.. seealso::
:ocv:func:`cornerMinEigenVal`,
:ocv:func:`cornerHarris`,
:ocv:func:`preCornerDetect`
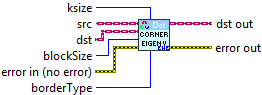
|
|
blockSize int |
|
|
ksize int |
|
|
borderType int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
Canny
Finds edges in an image using the [Canny86] algorithm.
image : single-channel 8-bit input image.
edges : output edge map; it has the same size and type as ``image`` .
threshold1 : first threshold for the hysteresis procedure.
threshold2 : second threshold for the hysteresis procedure.
apertureSize : aperture size for the :ocv:func:`Sobel` operator.
L2gradient : a flag, indicating whether a more accurate :math:`L_2` norm :math:`=\sqrt{(dI/dx)^2 + (dI/dy)^2}` should be used to calculate the image gradient magnitude ( ``L2gradient=true`` ), or whether the default :math:`L_1` norm :math:`=|dI/dx|+|dI/dy|` is enough ( ``L2gradient=false`` ).
The function finds edges in the input image ``image`` and marks them in the output map ``edges`` using the Canny algorithm. The smallest value between ``threshold1`` and ``threshold2`` is used for edge linking. The largest value is used to find initial segments of strong edges. See
http://en.wikipedia.org/wiki/Canny_edge_detector
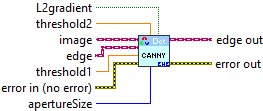
|
|
threshold1 double |
|
|
threshold2 double |
|
|
apertureSize int |
|
|
L2gradient |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
image |
|
|
edge |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
edge out |
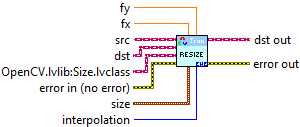
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
OpenCV.lvlib:Size.lvclass |
|
|
size |
|
|
width |
|
|
height |
|
|
fx |
|
|
fy |
|
|
interpolation |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
int lv_KalmanFilterpredict(int kf,int control);
int lv_KalmanFilterpredict(int kf,int control,int * err);

|
|
kf int |
|
|
measurementMatrix int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
Calculates the distance to the closest zero pixel for each pixel of the source image.
Parameters:
src � 8-bit, single-channel (binary) source image.
dst � Output image with calculated distances. It is a 32-bit floating-point, single-channel image of the same size as src .
distanceType � Type of distance. It can be CV_DIST_L1, CV_DIST_L2 , or CV_DIST_C .
maskSize � Size of the distance transform mask. It can be 3, 5, or CV_DIST_MASK_PRECISE (the latter option is only supported by the first function). In case of the CV_DIST_L1 or CV_DIST_C distance type, the parameter is forced to 3 because a 3\times 3 mask gives the same result as 5\times 5 or any larger aperture.
labels � Optional output 2D array of labels (the discrete Voronoi diagram). It has the type CV_32SC1 and the same size as src . See the details below.
labelType � Type of the label array to build. If labelType==DIST_LABEL_CCOMP then each connected component of zeros in src (as well as all the non-zero pixels closest to the connected component) will be assigned the same label. If labelType==DIST_LABEL_PIXEL then each zero pixel (and all the non-zero pixels closest to it) gets its own label.
The functions distanceTransform calculate the approximate or precise distance from every binary image pixel to the nearest zero pixel. For zero image pixels, the distance will obviously be zero.
When maskSize == CV_DIST_MASK_PRECISE and distanceType == CV_DIST_L2 , the function runs the algorithm described in [Felzenszwalb04]. This algorithm is parallelized with the TBB library.
In other cases, the algorithm [Borgefors86] is used. This means that for a pixel the function finds the shortest path to the nearest zero pixel consisting of basic shifts: horizontal, vertical, diagonal, or knight�s move (the latest is available for a 5\times 5 mask). The overall distance is calculated as a sum of these basic distances. Since the distance function should be symmetric, all of the horizontal and vertical shifts must have the same cost (denoted as a ), all the diagonal shifts must have the same cost (denoted as b ), and all knight�s moves must have the same cost (denoted as c ). For the CV_DIST_C and CV_DIST_L1 types, the distance is calculated precisely, whereas for CV_DIST_L2 (Euclidean distance) the distance can be calculated only with a relative error (a 5\times 5 mask gives more accurate results). For a,``b`` , and c , OpenCV uses the values suggested in the original paper:
CV_DIST_C (3 X 3) a = 1, b = 1
CV_DIST_L1 (3 X 3) a = 1, b = 2
CV_DIST_L2 (3 X 3) a=0.955, b=1.3693
CV_DIST_L2 (5 X 5) a=1, b=1.4, c=2.1969
Typically, for a fast, coarse distance estimation CV_DIST_L2, a 3\times 3 mask is used. For a more accurate distance estimation CV_DIST_L2 , a 5\times 5 mask or the precise algorithm is used. Note that both the precise and the approximate algorithms are linear on the number of pixels.
The second variant of the function does not only compute the minimum distance for each pixel (x, y) but also identifies the nearest connected component consisting of zero pixels (labelType==DIST_LABEL_CCOMP) or the nearest zero pixel (labelType==DIST_LABEL_PIXEL). Index of the component/pixel is stored in \texttt{labels}(x, y) . When labelType==DIST_LABEL_CCOMP, the function automatically finds connected components of zero pixels in the input image and marks them with distinct labels. When labelType==DIST_LABEL_CCOMP, the function scans through the input image and marks all the zero pixels with distinct labels.
In this mode, the complexity is still linear. That is, the function provides a very fast way to compute the Voronoi diagram for a binary image.
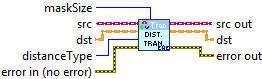
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
distanceType |
|
|
maskSize |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src out |
|
|
dst |
Fills a connected component with the given color
Parameters:
image �
Input/output 1- or 3-channel, 8-bit, or floating-point image. It is modified by the function unless the FLOODFILL_MASK_ONLY flag is set in the second variant of the function. See the details below.
mask �
Operation mask that should be a single-channel 8-bit image, 2 pixels wider and 2 pixels taller than image. Since this is both an input and output parameter, you must take responsibility of initializing it. Flood-filling cannot go across non-zero pixels in the input mask. For example, an edge detector output can be used as a mask to stop filling at edges. On output, pixels in the mask corresponding to filled pixels in the image are set to 1 or to the a value specified in flags as described below. It is therefore possible to use the same mask in multiple calls to the function to make sure the filled areas do not overlap.
Note Since the mask is larger than the filled image, a pixel (x, y) in image corresponds to the pixel (x+1, y+1) in the mask .
seedPoint �
Starting point.
newVal �
New value of the repainted domain pixels.
loDiff �
Maximal lower brightness/color difference between the currently observed pixel and one of its neighbors belonging to the component, or a seed pixel being added to the component.
upDiff �
Maximal upper brightness/color difference between the currently observed pixel and one of its neighbors belonging to the component, or a seed pixel being added to the component.
rect � Optional output parameter set by the function to the minimum bounding rectangle of the repainted domain.
flags �
Operation flags. The first 8 bits contain a connectivity value. The default value of 4 means that only the four nearest neighbor pixels (those that share an edge) are considered. A connectivity value of 8 means that the eight nearest neighbor pixels (those that share a corner) will be considered. The next 8 bits (8-16) contain a value between 1 and 255 with which to fill the mask (the default value is 1). For example, 4 | ( 255 << 8 ) will consider 4 nearest neighbours and fill the mask with a value of 255. The following additional options occupy higher bits and therefore may be further combined with the connectivity and mask fill values using bit-wise or (|):
FLOODFILL_FIXED_RANGE If set, the difference between the current pixel and seed pixel is considered. Otherwise, the difference between neighbor pixels is considered (that is, the range is floating).
FLOODFILL_MASK_ONLY If set, the function does not change the image ( newVal is ignored), and only fills the mask with the value specified in bits 8-16 of flags as described above. This option only make sense in function variants that have the mask parameter.
The functions floodFill fill a connected component starting from the seed point with the specified color. The connectivity is determined by the color/brightness closeness of the neighbor pixels.
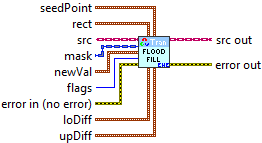
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
mask |
|
|
rect |
|
|
x |
|
|
y |
|
|
width |
|
|
height |
|
|
flags |
|
|
loDiff |
|
|
v0 double |
|
|
v1 double |
|
|
v2 double |
|
|
v3 double |
|
|
upDiff |
|
|
v0 double |
|
|
v1 double |
|
|
v2 double |
|
|
v3 double |
|
|
newVal |
|
|
v0 double |
|
|
v1 double |
|
|
v2 double |
|
|
v3 double |
|
|
seedPoint |
|
|
X |
|
|
Y |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src out |
threshold
src : input array (single-channel, 8-bit or 32-bit floating point).
dst : output array of the same size and type as ``src``.
thresh : threshold value.
maxval : maximum value to use with the ``THRESH_BINARY`` and ``THRESH_BINARY_INV`` thresholding types.
type : thresholding type (see the details below).
The function applies fixed-level thresholding
to a single-channel array. The function is typically used to get a
bi-level (binary) image out of a grayscale image (
:ocv:func:`compare` could
be also used for this purpose) or for removing a noise, that is, filtering
out pixels with too small or too large values. There are several
types of thresholding supported by the function. They are determined by ``type`` :
* **THRESH_BINARY**
.. math::
\texttt{dst} (x,y) = \fork{\texttt{maxval}}{if $\texttt{src}(x,y) > \texttt{thresh}$}{0}{otherwise}
* **THRESH_BINARY_INV**
.. math::
\texttt{dst} (x,y) = \fork{0}{if $\texttt{src}(x,y) > \texttt{thresh}$}{\texttt{maxval}}{otherwise}
* **THRESH_TRUNC**
.. math::
\texttt{dst} (x,y) = \fork{\texttt{threshold}}{if $\texttt{src}(x,y) > \texttt{thresh}$}{\texttt{src}(x,y)}{otherwise}
* **THRESH_TOZERO**
.. math::
\texttt{dst} (x,y) = \fork{\texttt{src}(x,y)}{if $\texttt{src}(x,y) > \texttt{thresh}$}{0}{otherwise}
* **THRESH_TOZERO_INV**
.. math::
\texttt{dst} (x,y) = \fork{0}{if $\texttt{src}(x,y) > \texttt{thresh}$}{\texttt{src}(x,y)}{otherwise}
Also, the special value ``THRESH_OTSU`` may be combined with
one of the above values. In this case, the function determines the optimal threshold
value using the Otsu's algorithm and uses it instead of the specified ``thresh`` .
The function returns the computed threshold value.
Currently, the Otsu's method is implemented only for 8-bit images.
.. image:: pics/threshold.png
.. seealso::
:ocv:func:`adaptiveThreshold`,
:ocv:func:`findContours`,
:ocv:func:`compare`,
:ocv:func:`min`,
:ocv:func:`max`
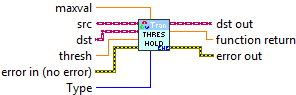
|
|
thresh double |
|
|
maxval double |
|
|
Type int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
function return double |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
cvtColor
Converts an image from one color space to another.
src : input image: 8-bit unsigned, 16-bit unsigned ( ``CV_16UC...`` ), or single-precision floating-point.
dst : output image of the same size and depth as ``src``.
code : color space conversion code (see the description below).
dstCn : number of channels in the destination image; if the parameter is 0, the number of the channels is derived automatically from ``src`` and ``code`` .
The function converts an input image from one color
space to another. In case of a transformation to-from RGB color space, the order of the channels should be specified explicitly (RGB or BGR).
Note that the default color format in OpenCV is often referred to as RGB but it is actually BGR (the bytes are reversed). So the first byte in a standard (24-bit) color image will be an 8-bit Blue component, the second byte will be Green, and the third byte will be Red. The fourth, fifth, and sixth bytes would then be the second pixel (Blue, then Green, then Red), and so on.
The conventional ranges for R, G, and B channel values are:
*
0 to 255 for ``CV_8U`` images
*
0 to 65535 for ``CV_16U`` images
*
0 to 1 for ``CV_32F`` images
In case of linear transformations, the range does not matter.
But in case of a non-linear transformation, an input RGB image should be normalized to the proper value range to get the correct results, for example, for RGB
:math:`\rightarrow` L*u*v* transformation. For example, if you have a 32-bit floating-point image directly converted from an 8-bit image without any scaling, then it will have the 0..255 value range instead of 0..1 assumed by the function. So, before calling ``cvtColor`` , you need first to scale the image down: ::
img *= 1./255;
cvtColor(img, img, CV_BGR2Luv);
If you use ``cvtColor`` with 8-bit images, the conversion will have some information lost. For many applications, this will not be noticeable but it is recommended to use 32-bit images in applications that need the full range of colors or that convert an image before an operation and then convert back.
The function can do the following transformations:
*
RGB :math:`\leftrightarrow` GRAY ( ``CV_BGR2GRAY, CV_RGB2GRAY, CV_GRAY2BGR, CV_GRAY2RGB`` )
Transformations within RGB space like adding/removing the alpha channel, reversing the channel order, conversion to/from 16-bit RGB color (R5:G6:B5 or R5:G5:B5), as well as conversion to/from grayscale using:
.. math::
\text{RGB[A] to Gray:} \quad Y \leftarrow 0.299 \cdot R + 0.587 \cdot G + 0.114 \cdot B
and
.. math::
\text{Gray to RGB[A]:} \quad R \leftarrow Y, G \leftarrow Y, B \leftarrow Y, A \leftarrow 0
The conversion from a RGB image to gray is done with:
::
cvtColor(src, bwsrc, CV_RGB2GRAY);
..
More advanced channel reordering can also be done with
:ocv:func:`mixChannels` .
*
RGB
:math:`\leftrightarrow` CIE XYZ.Rec 709 with D65 white point ( ``CV_BGR2XYZ, CV_RGB2XYZ, CV_XYZ2BGR, CV_XYZ2RGB`` ):
.. math::
\begin{bmatrix} X \\ Y \\ Z
\end{bmatrix} \leftarrow \begin{bmatrix} 0.412453 & 0.357580 & 0.180423 \\ 0.212671 & 0.715160 & 0.072169 \\ 0.019334 & 0.119193 & 0.950227
\end{bmatrix} \cdot \begin{bmatrix} R \\ G \\ B
\end{bmatrix}
.. math::
\begin{bmatrix} R \\ G \\ B
\end{bmatrix} \leftarrow \begin{bmatrix} 3.240479 & -1.53715 & -0.498535 \\ -0.969256 & 1.875991 & 0.041556 \\ 0.055648 & -0.204043 & 1.057311
\end{bmatrix} \cdot \begin{bmatrix} X \\ Y \\ Z
\end{bmatrix}
:math:`X`, :math:`Y` and
:math:`Z` cover the whole value range (in case of floating-point images,
:math:`Z` may exceed 1).
*
RGB
:math:`\leftrightarrow` YCrCb JPEG (or YCC) ( ``CV_BGR2YCrCb, CV_RGB2YCrCb, CV_YCrCb2BGR, CV_YCrCb2RGB`` )
.. math::
Y \leftarrow 0.299 \cdot R + 0.587 \cdot G + 0.114 \cdot B
.. math::
Cr \leftarrow (R-Y) \cdot 0.713 + delta
.. math::
Cb \leftarrow (B-Y) \cdot 0.564 + delta
.. math::
R \leftarrow Y + 1.403 \cdot (Cr - delta)
.. math::
G \leftarrow Y - 0.714 \cdot (Cr - delta) - 0.344 \cdot (Cb - delta)
.. math::
B \leftarrow Y + 1.773 \cdot (Cb - delta)
where
.. math::
delta = \left \{ \begin{array}{l l} 128 & \mbox{for 8-bit images} \\ 32768 & \mbox{for 16-bit images} \\ 0.5 & \mbox{for floating-point images} \end{array} \right .
Y, Cr, and Cb cover the whole value range.
*
RGB :math:`\leftrightarrow` HSV ( ``CV_BGR2HSV, CV_RGB2HSV, CV_HSV2BGR, CV_HSV2RGB`` )
In case of 8-bit and 16-bit images,
R, G, and B are converted to the floating-point format and scaled to fit the 0 to 1 range.
.. math::
V \leftarrow max(R,G,B)
.. math::
S \leftarrow \fork{\frac{V-min(R,G,B)}{V}}{if $V \neq 0$}{0}{otherwise}
.. math::
H \leftarrow \forkthree{{60(G - B)}/{(V-min(R,G,B))}}{if $V=R$}{{120+60(B - R)}/{(V-min(R,G,B))}}{if $V=G$}{{240+60(R - G)}/{(V-min(R,G,B))}}{if $V=B$}
If
:math:`H<0` then
:math:`H \leftarrow H+360` . On output
:math:`0 \leq V \leq 1`, :math:`0 \leq S \leq 1`, :math:`0 \leq H \leq 360` .
The values are then converted to the destination data type:
* 8-bit images
.. math::
V \leftarrow 255 V, S \leftarrow 255 S, H \leftarrow H/2 \text{(to fit to 0 to 255)}
* 16-bit images (currently not supported)
.. math::
V <- 65535 V, S <- 65535 S, H <- H
* 32-bit images
H, S, and V are left as is
*
RGB :math:`\leftrightarrow` HLS ( ``CV_BGR2HLS, CV_RGB2HLS, CV_HLS2BGR, CV_HLS2RGB`` ).
In case of 8-bit and 16-bit images,
R, G, and B are converted to the floating-point format and scaled to fit the 0 to 1 range.
.. math::
V_{max} \leftarrow {max}(R,G,B)
.. math::
V_{min} \leftarrow {min}(R,G,B)
.. math::
L \leftarrow \frac{V_{max} + V_{min}}{2}
.. math::
S \leftarrow \fork { \frac{V_{max} - V_{min}}{V_{max} + V_{min}} }{if $L < 0.5$ }
{ \frac{V_{max} - V_{min}}{2 - (V_{max} + V_{min})} }{if $L \ge 0.5$ }
.. math::
H \leftarrow \forkthree {{60(G - B)}/{S}}{if $V_{max}=R$ }
{{120+60(B - R)}/{S}}{if $V_{max}=G$ }
{{240+60(R - G)}/{S}}{if $V_{max}=B$ }
If
:math:`H<0` then
:math:`H \leftarrow H+360` . On output
:math:`0 \leq L \leq 1`, :math:`0 \leq S \leq 1`, :math:`0 \leq H \leq 360` .
The values are then converted to the destination data type:
* 8-bit images
.. math::
V \leftarrow 255 \cdot V, S \leftarrow 255 \cdot S, H \leftarrow H/2 \; \text{(to fit to 0 to 255)}
* 16-bit images (currently not supported)
.. math::
V <- 65535 \cdot V, S <- 65535 \cdot S, H <- H
* 32-bit images
H, S, V are left as is
*
RGB :math:`\leftrightarrow` CIE L*a*b* ( ``CV_BGR2Lab, CV_RGB2Lab, CV_Lab2BGR, CV_Lab2RGB`` ).
In case of 8-bit and 16-bit images,
R, G, and B are converted to the floating-point format and scaled to fit the 0 to 1 range.
.. math::
\vecthree{X}{Y}{Z} \leftarrow \vecthreethree{0.412453}{0.357580}{0.180423}{0.212671}{0.715160}{0.072169}{0.019334}{0.119193}{0.950227} \cdot \vecthree{R}{G}{B}
.. math::
X \leftarrow X/X_n, \text{where} X_n = 0.950456
.. math::
Z \leftarrow Z/Z_n, \text{where} Z_n = 1.088754
.. math::
L \leftarrow \fork{116*Y^{1/3}-16}{for $Y>0.008856$}{903.3*Y}{for $Y \le 0.008856$}
.. math::
a \leftarrow 500 (f(X)-f(Y)) + delta
.. math::
b \leftarrow 200 (f(Y)-f(Z)) + delta
where
.. math::
f(t)= \fork{t^{1/3}}{for $t>0.008856$}{7.787 t+16/116}{for $t\leq 0.008856$}
and
.. math::
delta = \fork{128}{for 8-bit images}{0}{for floating-point images}
This outputs
:math:`0 \leq L \leq 100`, :math:`-127 \leq a \leq 127`, :math:`-127 \leq b \leq 127` . The values are then converted to the destination data type:
* 8-bit images
.. math::
L \leftarrow L*255/100, \; a \leftarrow a + 128, \; b \leftarrow b + 128
* 16-bit images
(currently not supported)
* 32-bit images
L, a, and b are left as is
*
RGB :math:`\leftrightarrow` CIE L*u*v* ( ``CV_BGR2Luv, CV_RGB2Luv, CV_Luv2BGR, CV_Luv2RGB`` ).
In case of 8-bit and 16-bit images,
R, G, and B are converted to the floating-point format and scaled to fit 0 to 1 range.
.. math::
\vecthree{X}{Y}{Z} \leftarrow \vecthreethree{0.412453}{0.357580}{0.180423}{0.212671}{0.715160}{0.072169}{0.019334}{0.119193}{0.950227} \cdot \vecthree{R}{G}{B}
.. math::
L \leftarrow \fork{116 Y^{1/3}}{for $Y>0.008856$}{903.3 Y}{for $Y\leq 0.008856$}
.. math::
u' \leftarrow 4*X/(X + 15*Y + 3 Z)
.. math::
v' \leftarrow 9*Y/(X + 15*Y + 3 Z)
.. math::
u \leftarrow 13*L*(u' - u_n) \quad \text{where} \quad u_n=0.19793943
.. math::
v \leftarrow 13*L*(v' - v_n) \quad \text{where} \quad v_n=0.46831096
This outputs
:math:`0 \leq L \leq 100`, :math:`-134 \leq u \leq 220`, :math:`-140 \leq v \leq 122` .
The values are then converted to the destination data type:
* 8-bit images
.. math::
L \leftarrow 255/100 L, \; u \leftarrow 255/354 (u + 134), \; v \leftarrow 255/256 (v + 140)
* 16-bit images
(currently not supported)
* 32-bit images
L, u, and v are left as is
The above formulae for converting RGB to/from various color spaces have been taken from multiple sources on the web, primarily from the Charles Poynton site
http://www.poynton.com/ColorFAQ.html
*
Bayer :math:`\rightarrow` RGB ( ``CV_BayerBG2BGR, CV_BayerGB2BGR, CV_BayerRG2BGR, CV_BayerGR2BGR, CV_BayerBG2RGB, CV_BayerGB2RGB, CV_BayerRG2RGB, CV_BayerGR2RGB`` ). The Bayer pattern is widely used in CCD and CMOS cameras. It enables you to get color pictures from a single plane where R,G, and B pixels (sensors of a particular component) are interleaved as follows:
.. image:: pics/bayer.png
The output RGB components of a pixel are interpolated from 1, 2, or
4 neighbors of the pixel having the same color. There are several
modifications of the above pattern that can be achieved by shifting
the pattern one pixel left and/or one pixel up. The two letters
:math:`C_1` and
:math:`C_2` in the conversion constants ``CV_Bayer`` :math:`C_1 C_2` ``2BGR`` and ``CV_Bayer`` :math:`C_1 C_2` ``2RGB`` indicate the particular pattern
type. These are components from the second row, second and third
columns, respectively. For example, the above pattern has a very
popular "BG" type.
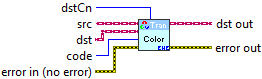
|
|
code |
|
|
dstCn int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
adaptiveThreshold
src : Source 8-bit single-channel image.
dst : Destination image of the same size and the same type as ``src`` .
maxValue : Non-zero value assigned to the pixels for which the condition is satisfied. See the details below.
adaptiveMethod : Adaptive thresholding algorithm to use, ``ADAPTIVE_THRESH_MEAN_C`` or ``ADAPTIVE_THRESH_GAUSSIAN_C`` . See the details below.
thresholdType : Thresholding type that must be either ``THRESH_BINARY`` or ``THRESH_BINARY_INV`` .
blockSize : Size of a pixel neighborhood that is used to calculate a threshold value for the pixel: 3, 5, 7, and so on.
C : Constant subtracted from the mean or weighted mean (see the details below). Normally, it is positive but may be zero or negative as well.
The function transforms a grayscale image to a binary image according to the formulae:
* **THRESH_BINARY**
.. math::
dst(x,y) = \fork{\texttt{maxValue}}{if $src(x,y) > T(x,y)$}{0}{otherwise}
* **THRESH_BINARY_INV**
.. math::
dst(x,y) = \fork{0}{if $src(x,y) > T(x,y)$}{\texttt{maxValue}}{otherwise}
where
:math:`T(x,y)` is a threshold calculated individually for each pixel.
*
For the method ``ADAPTIVE_THRESH_MEAN_C`` , the threshold value
:math:`T(x,y)` is a mean of the
:math:`\texttt{blockSize} \times \texttt{blockSize}` neighborhood of
:math:`(x, y)` minus ``C`` .
*
For the method ``ADAPTIVE_THRESH_GAUSSIAN_C`` , the threshold value
:math:`T(x, y)` is a weighted sum (cross-correlation with a Gaussian window) of the
:math:`\texttt{blockSize} \times \texttt{blockSize}` neighborhood of
:math:`(x, y)` minus ``C`` . The default sigma (standard deviation) is used for the specified ``blockSize`` . See
:ocv:func:`getGaussianKernel` .
The function can process the image in-place.
.. seealso::
:ocv:func:`threshold`,
:ocv:func:`blur`,
:ocv:func:`GaussianBlur`
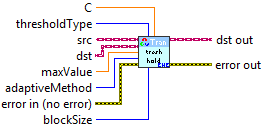
|
|
maxValue double |
|
|
adaptiveMethod int |
|
|
thresholdType int |
|
|
blockSize int |
|
|
C double |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
Integral
Calculates the integral of an image.
src input Image
dest output Image
ring required output depth
The functions calculate one or more integral images for the source image.
Using these integral images, you can calculate sum, mean, and standard deviation over a specific up-right or rotated rectangular region of the image in a constant time.
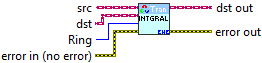
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
Ring |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
Sobel
-----
Calculates the first, second, third, or mixed image derivatives using an extended Sobel operator.
src: input image.
dst: output image of the same size and the same number of channels as ``src`` .
ddepth: output image depth; the following combinations of ``src.depth()`` and ``ddepth`` are supported:
* ``src.depth()`` = ``CV_8U``, ``ddepth`` = -1/``CV_16S``/``CV_32F``/``CV_64F``
* ``src.depth()`` = ``CV_16U``/``CV_16S``, ``ddepth`` = -1/``CV_32F``/``CV_64F``
* ``src.depth()`` = ``CV_32F``, ``ddepth`` = -1/``CV_32F``/``CV_64F``
* ``src.depth()`` = ``CV_64F``, ``ddepth`` = -1/``CV_64F``
when ``ddepth=-1``, the destination image will have the same depth as the source; in the case of 8-bit input images it will result in truncated derivatives.
xorder: order of the derivative x.
yorder: order of the derivative y.
ksize: size of the extended Sobel kernel; it must be 1, 3, 5, or 7.
scale: optional scale factor for the computed derivative values; by default, no scaling is applied (see :ocv:func:`getDerivKernels` for details).
delta: optional delta value that is added to the results prior to storing them in ``dst``.
borderType: pixel extrapolation method (see :ocv:func:`borderInterpolate` for details).
In all cases except one, the ksize * ksize separable kernel is used to calculate the derivative. When ksize = 1, the 3 x 1 or 1 x 3 kernel is used (that is, no Gaussian smoothing is done). ksize = 1 can only be used for the first or the second x- or y- derivatives.
There is also the special value ksize = CV_SCHARR (-1) that corresponds to the 3x3 Scharr filter that may give more accurate results than the 3x3 Sobel. The Scharr aperture is
\vecthreethree{-3}{0}{3}{-10}{0}{10}{-3}{0}{3}
for the x-derivative, or transposed for the y-derivative.
The function calculates an image derivative by convolving the image with the appropriate kernel:
\texttt{dst} = \frac{\partial^{xorder+yorder} \texttt{src}}{\partial x^{xorder} \partial y^{yorder}}
The Sobel operators combine Gaussian smoothing and differentiation, so the result is more or less resistant to the noise. Most often, the function is called with ( xorder = 1, yorder = 0, ksize = 3) or ( xorder = 0, yorder = 1, ksize = 3) to calculate the first x- or y- image derivative. The first case corresponds to a kernel of:
\vecthreethree{-1}{0}{1}{-2}{0}{2}{-1}{0}{1}
The second case corresponds to a kernel of:
\vecthreethree{-1}{-2}{-1}{0}{0}{0}{1}{2}{1}
|
|
ddepth |
|
|
dx int |
|
|
dy int |
|
|
scale double |
|
|
delta double |
|
|
borderType int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
ksize |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
sepFilter2D
src : Source image.
dst : Destination image of the same size and the same number of channels as ``src`` .
ddepth : Destination image depth. The following combination of ``src.depth()`` and ``ddepth`` are supported:
* ``src.depth()`` = ``CV_8U``, ``ddepth`` = -1/``CV_16S``/``CV_32F``/``CV_64F``
* ``src.depth()`` = ``CV_16U``/``CV_16S``, ``ddepth`` = -1/``CV_32F``/``CV_64F``
* ``src.depth()`` = ``CV_32F``, ``ddepth`` = -1/``CV_32F``/``CV_64F``
* ``src.depth()`` = ``CV_64F``, ``ddepth`` = -1/``CV_64F``
kernelX : Coefficients for filtering each row.
kernelY : Coefficients for filtering each column.
anchor : Anchor position within the kernel. The default value :math:`(-1, 1)` means that the anchor is at the kernel center.
delta : Value added to the filtered results before storing them.
borderType : Pixel extrapolation method. See :ocv:func:`borderInterpolate` for details.
The function applies a separable linear filter to the image. That is, first, every row of ``src`` is filtered with the 1D kernel ``kernelX`` . Then, every column of the result is filtered with the 1D kernel ``kernelY`` . The final result shifted by ``delta`` is stored in ``dst`` .
.. seealso::
:ocv:func:`createSeparableLinearFilter`,
:ocv:func:`filter2D`,
:ocv:func:`Sobel`,
:ocv:func:`GaussianBlur`,
:ocv:func:`boxFilter`,
:ocv:func:`blur`
|
|
ddepth |
|
|
delta double |
|
|
borderType int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
anchor |
|
|
X |
|
|
Y |
|
|
kernelX int |
|
|
Numeric |
|
|
kernelY int |
|
|
Numeric |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst |
pyrMeanShiftFiltering
Performs initial step of meanshift segmentation of an image.
src : The source 8-bit, 3-channel image.
dst : The destination image of the same format and the same size as the source.
sp : The spatial window radius.
sr : The color window radius.
maxLevel : Maximum level of the pyramid for the segmentation.
termcrit : Termination criteria: when to stop meanshift iterations.
The function implements the filtering stage of meanshift segmentation, that is, the output of the function is the filtered "posterized" image with color gradients and fine-grain texture flattened. At every pixel
``(X,Y)`` of the input image (or down-sized input image, see below) the function executes meanshift
iterations, that is, the pixel ``(X,Y)`` neighborhood in the joint space-color hyperspace is considered:
(x,y): X- sp <= x <= X+ sp , Y- sp <= y <= Y+ sp , ||(R,G,B)-(r,g,b)|| <= sr
where ``(R,G,B)`` and ``(r,g,b)`` are the vectors of color components at ``(X,Y)`` and ``(x,y)``, respectively (though, the algorithm does not depend on the color space used, so any 3-component color space can be used instead). Over the neighborhood the average spatial value ``(X',Y')`` and average color vector ``(R',G',B')`` are found and they act as the neighborhood center on the next iteration:
.. math::
(X,Y)~(X',Y'), (R,G,B)~(R',G',B').
After the iterations over, the color components of the initial pixel (that is, the pixel from where the iterations started) are set to the final value (average color at the last iteration):
.. math::
I(X,Y) <- (R*,G*,B*)
When ``maxLevel > 0``, the gaussian pyramid of ``maxLevel+1`` levels is built, and the above procedure is run on the smallest layer first. After that, the results are propagated to the larger layer and the iterations are run again only on those pixels where the layer colors differ by more than ``sr`` from the lower-resolution layer of the pyramid. That makes boundaries of color regions sharper. Note that the results will be actually different from the ones obtained by running the meanshift procedure on the whole original image (i.e. when ``maxLevel==0``).
|
|
sp double |
|
|
sr double |
|
|
maxLevel int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
pyrUp
-----
Upsamples an image and then blurs it.
src: input image.
dst: output image. It has the specified size and the same type as ``src`` .
dstsize (ksize): size of the output image; by default, it is computed as ``Size(src.cols*2, (src.rows*2)``, but in any case, the following conditions should be satisfied:
.. math::
|dstsize.width - src.cols*2| <= (dstsize.width mod 2)
|dstsize.height - src.rows*2| <= (dstsize.height mod 2)
The function performs the upsampling step of the Gaussian pyramid construction, though it can actually be used to construct the Laplacian pyramid. First, it upsamples the source image by injecting even zero rows and columns and then convolves the result with the same kernel as in
:ocv:func:`pyrDown` multiplied by 4.
|
|
borderType int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
dstsize |
|
|
width |
|
|
height |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
pyrDown
src : input image.
dst : output image; it has the specified size and the same type as ``src``.
dstsize : size of the output image; by default, it is computed as ``Size((src.cols+1)/2, (src.rows+1)/2)``, but in any case, the following conditions should be satisfied:
.. math::
\begin{array}{l}
| \texttt{dstsize.width} *2-src.cols| \leq 2 \\ | \texttt{dstsize.height} *2-src.rows| \leq 2 \end{array}
The function performs the downsampling step of the Gaussian pyramid construction. First, it convolves the source image with the kernel:
.. math::
\frac{1}{256} \begin{bmatrix} 1 & 4 & 6 & 4 & 1 \\ 4 & 16 & 24 & 16 & 4 \\ 6 & 24 & 36 & 24 & 6 \\ 4 & 16 & 24 & 16 & 4 \\ 1 & 4 & 6 & 4 & 1 \end{bmatrix}
Then, it downsamples the image by rejecting even rows and columns.
|
|
borderType int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
dssize |
|
|
width |
|
|
height |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
Laplacian
src : Source image.
dst : Destination image of the same size and the same number of channels as ``src`` .
ddepth : Desired depth of the destination image.
ksize : Aperture size used to compute the second-derivative filters. See :ocv:func:`getDerivKernels` for details. The size must be positive and odd.
scale : Optional scale factor for the computed Laplacian values. By default, no scaling is applied. See :ocv:func:`getDerivKernels` for details.
delta : Optional delta value that is added to the results prior to storing them in ``dst`` .
borderType : Pixel extrapolation method. See :ocv:func:`borderInterpolate` for details.
The function calculates the Laplacian of the source image by adding up the second x and y derivatives calculated using the Sobel operator:
.. math::
\texttt{dst} = \Delta \texttt{src} = \frac{\partial^2 \texttt{src}}{\partial x^2} + \frac{\partial^2 \texttt{src}}{\partial y^2}
This is done when ``ksize > 1`` . When ``ksize == 1`` , the Laplacian is computed by filtering the image with the following
:math:`3 \times 3` aperture:
.. math::
\vecthreethree {0}{1}{0}{1}{-4}{1}{0}{1}{0}
.. seealso::
:ocv:func:`Sobel`,
:ocv:func:`Scharr`
|
|
ddepth |
|
|
scale double |
|
|
delta double |
|
|
borderType int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
ksize |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
morphologyEx
src : Source image. The number of channels can be arbitrary. The depth should be one of ``CV_8U``, ``CV_16U``, ``CV_16S``, ``CV_32F` or ``CV_64F``.
dst : Destination image of the same size and type as ``src`` .
element : Structuring element.
op : Type of a morphological operation that can be one of the following:
Type of a morphological operation that can be one of the following:
MORPH_OPEN - an opening operation
MORPH_CLOSE - a closing operation
MORPH_GRADIENT - a morphological gradient
MORPH_TOPHAT - �top hat�
MORPH_BLACKHAT - �black hat�
iterations : Number of times erosion and dilation are applied.
borderType : Pixel extrapolation method. See :ocv:func:`borderInterpolate` for details.
borderValue : Border value in case of a constant border. The default value has a special meaning. See :ocv:func:`createMorphologyFilter` for details.
The function can perform advanced morphological transformations using an erosion and dilation as basic operations.
Opening operation:
dst = open( src, element )=dilate( erode(src , element))
Closing operation:
dst = close( src , element )= erode(dilate( src , element ))
Morphological gradient:
dst =morph_grad(src , element)= dilate( src, element)- erode( src , element)
"Top hat":
dst = tophat(src , element )= src -open( src , element )
"Black hat":
dst = blackhat(src , element )= close( src , element )- src
Any of the operations can be done in-place. In case of multi-channel images, each channel is processed independently.
.. seealso::
:ocv:func:`dilate`,
:ocv:func:`erode`,
:ocv:func:`createMorphologyFilter`
|
|
op int |
|
|
iterations int |
|
|
borderType int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
borderValue |
|
|
v0 double |
|
|
v1 double |
|
|
v2 double |
|
|
v3 double |
|
|
kernel int |
|
|
Numeric |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
medianBlur
src : input 1-, 3-, or 4-channel image; when ``ksize`` is 3 or 5, the image depth should be ``CV_8U``, ``CV_16U``, or ``CV_32F``, for larger aperture sizes, it can only be ``CV_8U``.
dst : destination array of the same size and type as ``src``.
ksize : aperture linear size; it must be odd and greater than 1, for example: 3, 5, 7 ...
The function smoothes an image using the median filter with the
:math:`\texttt{ksize} \times \texttt{ksize}` aperture. Each channel of a multi-channel image is processed independently. In-place operation is supported.
.. seealso::
:ocv:func:`bilateralFilter`,
:ocv:func:`blur`,
:ocv:func:`boxFilter`,
:ocv:func:`GaussianBlur`
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
ksize |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
dilate
------
Dilates an image by using a specific structuring element.
:param src: input image; the number of channels can be arbitrary, but the depth should be one of ``CV_8U``, ``CV_16U``, ``CV_16S``, ``CV_32F` or ``CV_64F``.
:param dst: output image of the same size and type as ``src``.
:param element: structuring element used for dilation; if ``element=Mat()`` , a ``3 x 3`` rectangular structuring element is used.
:param anchor: position of the anchor within the element; default value ``(-1, -1)`` means that the anchor is at the element center.
:param iterations: number of times dilation is applied.
:param borderType: pixel extrapolation method (see :ocv:func:`borderInterpolate` for details).
:param borderValue: border value in case of a constant border (see :ocv:func:`createMorphologyFilter` for details).
The function dilates the source image using the specified structuring element that determines the shape of a pixel neighborhood over which the maximum is taken:
.. math::
\texttt{dst} (x,y) = \max _{(x',y'): \, \texttt{element} (x',y') \ne0 } \texttt{src} (x+x',y+y')
The function supports the in-place mode. Dilation can be applied several ( ``iterations`` ) times. In case of multi-channel images, each channel is processed independently.
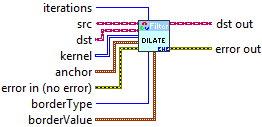
|
|
iterations int |
|
|
borderType int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
anchor |
|
|
X |
|
|
Y |
|
|
borderValue |
|
|
v0 double |
|
|
v1 double |
|
|
v2 double |
|
|
v3 double |
|
|
kernel int |
|
|
Numeric |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
erode
-----
Erodes an image by using a specific structuring element.
src: input image; the number of channels can be arbitrary, but the depth should be one of ``CV_8U``, ``CV_16U``, ``CV_16S``, ``CV_32F` or ``CV_64F``.
dst: output image of the same size and type as ``src``.
element: structuring element used for erosion; if ``element=Mat()`` , a ``3 x 3`` rectangular structuring element is used.
anchor: position of the anchor within the element; default value ``(-1, -1)`` means that the anchor is at the element center.
iterations: number of times erosion is applied.
borderType: pixel extrapolation method (see :ocv:func:`borderInterpolate` for details).
borderValue: border value in case of a constant border (see :ocv:func:`createMorphologyFilter` for details).
The function erodes the source image using the specified structuring element that determines the shape of a pixel neighborhood over which the minimum is taken:
.. math::
\texttt{dst} (x,y) = \min _{(x',y'): \, \texttt{element} (x',y') \ne0 } \texttt{src} (x+x',y+y')
The function supports the in-place mode. Erosion can be applied several ( ``iterations`` ) times. In case of multi-channel images, each channel is processed independently.
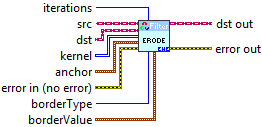
|
|
iterations int |
|
|
borderType int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
anchor |
|
|
X |
|
|
Y |
|
|
kernel int |
|
|
Numeric |
|
|
borderValue |
|
|
v0 double |
|
|
v1 double |
|
|
v2 double |
|
|
v3 double |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
GaussianBlur
Blurs an image using a Gaussian filter.
src : input image; the image can have any number of channels, which are processed independently, but the depth should be ``CV_8U``, ``CV_16U``, ``CV_16S``, ``CV_32F`` or ``CV_64F``.
dst : output image of the same size and type as ``src``.
ksize : Gaussian kernel size. ``ksize.width`` and ``ksize.height`` can differ but they both must be positive and odd. Or, they can be zero's and then they are computed from ``sigma*`` .
sigmaX : Gaussian kernel standard deviation in X direction.
sigmaY : Gaussian kernel standard deviation in Y direction; if ``sigmaY`` is zero, it is set to be equal to ``sigmaX``, if both sigmas are zeros, they are computed from ``ksize.width`` and ``ksize.height`` , respectively (see :ocv:func:`getGaussianKernel` for details); to fully control the result regardless of possible future modifications of all this semantics, it is recommended to specify all of ``ksize``, ``sigmaX``, and ``sigmaY``.
borderType : pixel extrapolation method (see :ocv:func:`borderInterpolate` for details).
The function convolves the source image with the specified Gaussian kernel. In-place filtering is supported.
.. seealso::
:ocv:func:`sepFilter2D`,
:ocv:func:`filter2D`,
:ocv:func:`blur`,
:ocv:func:`boxFilter`,
:ocv:func:`bilateralFilter`,
:ocv:func:`medianBlur`
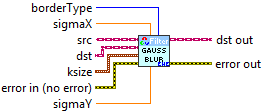
|
|
sigmaX double |
|
|
sigmaY double |
|
|
borderType int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
ksize |
|
|
width |
|
|
height |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
filter2D
src : input image.
dst : output image of the same size and the same number of channels as ``src``.
ddepth : desired depth of the destination image; if it is negative, it will be the same as ``src.depth()``; the following combinations of ``src.depth()`` and ``ddepth`` are supported:
* ``src.depth()`` = ``CV_8U``, ``ddepth`` = -1/``CV_16S``/``CV_32F``/``CV_64F``
* ``src.depth()`` = ``CV_16U``/``CV_16S``, ``ddepth`` = -1/``CV_32F``/``CV_64F``
* ``src.depth()`` = ``CV_32F``, ``ddepth`` = -1/``CV_32F``/``CV_64F``
* ``src.depth()`` = ``CV_64F``, ``ddepth`` = -1/``CV_64F``
kernel : convolution kernel (or rather a correlation kernel), a single-channel floating point matrix; if you want to apply different kernels to different channels, split the image into separate color planes using :ocv:func:`split` and process them individually.
anchor : anchor of the kernel that indicates the relative position of a filtered point within the kernel; the anchor should lie within the kernel; default value (-1,-1) means that the anchor is at the kernel center.
delta : optional value added to the filtered pixels before storing them in ``dst``.
borderType : pixel extrapolation method (see :ocv:func:`borderInterpolate` for details).
The function applies an arbitrary linear filter to an image. In-place operation is supported. When the aperture is partially outside the image, the function interpolates outlier pixel values according to the specified border mode.
The function does actually compute correlation, not the convolution:
.. math::
\texttt{dst} (x,y) = \sum _{ \stackrel{0\leq x' < \texttt{kernel.cols},}{0\leq y' < \texttt{kernel.rows}} } \texttt{kernel} (x',y')* \texttt{src} (x+x'- \texttt{anchor.x} ,y+y'- \texttt{anchor.y} )
That is, the kernel is not mirrored around the anchor point. If you need a real convolution, flip the kernel using
:ocv:func:`flip` and set the new anchor to ``(kernel.cols - anchor.x - 1, kernel.rows - anchor.y - 1)`` .
The function uses the DFT-based algorithm in case of sufficiently large kernels (~``11 x 11`` or larger) and the direct algorithm (that uses the engine retrieved by :ocv:func:`createLinearFilter` ) for small kernels.
.. seealso::
:ocv:func:`sepFilter2D`,
:ocv:func:`createLinearFilter`,
:ocv:func:`dft`,
:ocv:func:`matchTemplate`
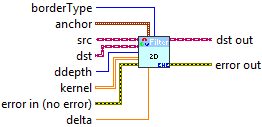
|
|
ddepth |
|
|
kernel int |
|
|
Numeric |
|
|
delta double |
|
|
borderType int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
anchor |
|
|
X |
|
|
Y |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
copyMakeBorder
src : Source image.
dst : Destination image of the same type as ``src`` and the size ``Size(src.cols+left+right, src.rows+top+bottom)`` .
top :
bottom :
left :
right : Parameter specifying how many pixels in each direction from the source image rectangle to extrapolate. For example, ``top=1, bottom=1, left=1, right=1`` mean that 1 pixel-wide border needs to be built.
borderType : Border type. See :ocv:func:`borderInterpolate` for details.
value : Border value if ``borderType==BORDER_CONSTANT`` .
The function copies the source image into the middle of the destination image. The areas to the left, to the right, above and below the copied source image will be filled with extrapolated pixels. This is not what
:ocv:class:`FilterEngine` or filtering functions based on it do (they extrapolate pixels on-fly), but what other more complex functions, including your own, may do to simplify image boundary handling.
The function supports the mode when ``src`` is already in the middle of ``dst`` . In this case, the function does not copy ``src`` itself but simply constructs the border, for example: ::
// let border be the same in all directions
int border=2;
// constructs a larger image to fit both the image and the border
Mat gray_buf(rgb.rows + border*2, rgb.cols + border*2, rgb.depth());
// select the middle part of it w/o copying data
Mat gray(gray_canvas, Rect(border, border, rgb.cols, rgb.rows));
// convert image from RGB to grayscale
cvtColor(rgb, gray, CV_RGB2GRAY);
// form a border in-place
copyMakeBorder(gray, gray_buf, border, border,
border, border, BORDER_REPLICATE);
// now do some custom filtering ...
...
.. note::
When the source image is a part (ROI) of a bigger image, the function will try to use the pixels outside of the ROI to form a border. To disable this feature and always do extrapolation, as if ``src`` was not a ROI, use ``borderType | BORDER_ISOLATED``.
.. seealso::
:ocv:func:`borderInterpolate`
|
|
top int |
|
|
bottom int |
|
|
left int |
|
|
right int |
|
|
borderType int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
value |
|
|
v0 double |
|
|
v1 double |
|
|
v2 double |
|
|
v3 double |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
blur
----
Blurs an image using the normalized box filter.
src: input image; it can have any number of channels, which are processed independently, but the depth should be ``CV_8U``, ``CV_16U``, ``CV_16S``, ``CV_32F`` or ``CV_64F``.
dst: output image of the same size and type as ``src``.
ksize: blurring kernel size.
anchor: anchor point; default value ``Point(-1,-1)`` means that the anchor is at the kernel center.
borderType: border mode used to extrapolate pixels outside of the image.
The function smoothes an image using the kernel:
K = (1/(ksize.width*ksize.height)) * {matrix of ones}
The call ``blur(src, dst, ksize, anchor, borderType)`` is equivalent to ``boxFilter(src, dst, src.type(), anchor, true, borderType)`` .
|
|
borderType int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
anchor |
|
|
X |
|
|
Y |
|
|
ksize |
|
|
width |
|
|
height |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
boxFilter
src : input image.
dst : output image of the same size and type as ``src``.
ddepth : the output image depth (-1 to use ``src.depth()``).
ksize : blurring kernel size.
anchor : anchor point; default value ``Point(-1,-1)`` means that the anchor is at the kernel center.
normalize : flag, specifying whether the kernel is normalized by its area or not.
borderType : border mode used to extrapolate pixels outside of the image.
The function smoothes an image using the kernel:
.. math::
\texttt{K} = \alpha \begin{bmatrix} 1 & 1 & 1 & \cdots & 1 & 1 \\ 1 & 1 & 1 & \cdots & 1 & 1 \\ \hdotsfor{6} \\ 1 & 1 & 1 & \cdots & 1 & 1 \end{bmatrix}
where
.. math::
\alpha = \fork{\frac{1}{\texttt{ksize.width*ksize.height}}}{when \texttt{normalize=true}}{1}{otherwise}
Unnormalized box filter is useful for computing various integral characteristics over each pixel neighborhood, such as covariance matrices of image derivatives (used in dense optical flow algorithms, and so on). If you need to compute pixel sums over variable-size windows, use :ocv:func:`integral` .
.. seealso::
:ocv:func:`blur`,
:ocv:func:`bilateralFilter`,
:ocv:func:`GaussianBlur`,
:ocv:func:`medianBlur`,
:ocv:func:`integral`
|
|
ddepth |
|
|
normalize |
|
|
borderType int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
anchor |
|
|
X |
|
|
Y |
|
|
ksize |
|
|
width |
|
|
height |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
bilateralFilter
src : Source 8-bit or floating-point, 1-channel or 3-channel image.
dst : Destination image of the same size and type as ``src`` .
d : Diameter of each pixel neighborhood that is used during filtering. If it is non-positive, it is computed from ``sigmaSpace`` .
sigmaColor : Filter sigma in the color space. A larger value of the parameter means that farther colors within the pixel neighborhood (see ``sigmaSpace`` ) will be mixed together, resulting in larger areas of semi-equal color.
sigmaSpace : Filter sigma in the coordinate space. A larger value of the parameter means that farther pixels will influence each other as long as their colors are close enough (see ``sigmaColor`` ). When ``d>0`` , it specifies the neighborhood size regardless of ``sigmaSpace`` . Otherwise, ``d`` is proportional to ``sigmaSpace`` .
borderType : border mode used to extrapolate pixels outside of the image.
The function applies bilateral filtering to the input image, as described in
http://www.dai.ed.ac.uk/CVonline/LOCAL\_COPIES/MANDUCHI1/Bilateral\_Filtering.html
``bilateralFilter`` can reduce unwanted noise very well while keeping edges fairly sharp. However, it is very slow compared to most filters.
*Sigma values*: For simplicity, you can set the 2 sigma values to be the same. If they are small (< 10), the filter will not have much effect, whereas if they are large (> 150), they will have a very strong effect, making the image look "cartoonish".
*Filter size*: Large filters (d > 5) are very slow, so it is recommended to use d=5 for real-time applications, and perhaps d=9 for offline applications that need heavy noise filtering.
This filter does not work inplace.
|
|
src |
|
|
dst |
|
|
d int |
|
|
sigmaColor double |
|
|
sigmaSpace double |
|
|
borderType int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
split
-----
Divides a multi-channel array into several single-channel arrays.
src: input multi-channel array.
The functions ``split`` split a multi-channel array into separate single-channel arrays

|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
VecMat |
setIdentity
----
Initializes a scaled identity matrix.
src: matrix to initialize (not necessarily square).
scalar: value to assign to diagonal elements.
The function 'setIdentity' initializes a scaled identity matrix.

|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
Scalar |
|
|
v0 double |
|
|
v1 double |
|
|
v2 double |
|
|
v3 double |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src out |
sort
----
Sorts each row or each column of a matrix.
src: input single-channel array.
dst: output array of the same size and type as ``src``.
flags: operation flags, a combination of the following values:
* **CV_SORT_EVERY_ROW** each matrix row is sorted independently.
* **CV_SORT_EVERY_COLUMN** each matrix column is sorted independently; this flag and the previous one are mutually exclusive.
* **CV_SORT_ASCENDING** each matrix row is sorted in the ascending order.
* **CV_SORT_DESCENDING** each matrix row is sorted in the descending order; this flag and the previous one are also mutually exclusive.
The function ``sort`` sorts each matrix row or each matrix column in ascending or descending order. So you should pass two operation flags to get desired behaviour. If you want to sort matrix rows or columns lexicographically, you can use STL ``std::sort`` generic function with the proper comparison predicate.
|
|
flags int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
Calculates the per-element sum of two arrays or an array and a scalar.
Parameters:
src1 � first input array .
src2 � second input array or a scalar.
src � single input array.
value � scalar value.
dst � output array that has the same size and number of channels as the input array(s); the depth is defined by dtype or src1/src2.
mask � optional operation mask - 8-bit single channel array, that specifies elements of the output array to be changed.
In case of multi-channel arrays, each channel is processed independently.
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src1 |
|
|
src2 |
|
|
dst |
|
|
mask |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
abs
Calculates an absolute value of each matrix element.
m (src): matrix.
``abs`` is a meta-function that is expanded to one of :ocv:func:`absdiff` or :ocv:func:`convertScaleAbs` forms:
*dst = abs(src)``
The output matrix has the same size and the same type as the input one.

|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst |
Phase
Calculates the rotation angle of 2D vectors
x : floating-point array of x-coordinates of the vectors.
y : floating-point array of y-coordinates of the vectors; it must have the same size as ``x``.
dst (the angles in radians) : output array of the same size and type as ``x``.
The function phase calculates the rotation angle of each 2D vector that is formed from the corresponding elements of x and y :
angle(I) = atan2(y(I),x(I))
The angle estimation accuracy is about 0.3 degrees (about 0.005 radians). When x(I)=y(I)=0 , the corresponding angle(I) is set to 0.

|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
x |
|
|
dst |
|
|
y |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
transpose
src : input array.
dst : output array of the same type as ``src``.
The function `transpose` transposes the matrix ``src`` :
dst(i,j) = src(j,i)
.. note:: No complex conjugation is done in case of a complex matrix. It it should be done separately if needed.

|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
sum
---
Calculates the sum of array elements.
src: input array that must have from 1 to 4 channels.
The functions ``sum`` calculate and return the sum of array elements, independently for each channel.

|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Sum |
|
|
v0 |
|
|
v1 |
|
|
v2 |
|
|
v3 |
sqrt
----
Calculates a square root of array elements.
src: input floating-point array.
dst: output array of the same size and type as ``src``.
The functions ``sqrt`` calculate a square root of each input array element. In case of multi-channel arrays, each channel is processed independently. The accuracy is approximately the same as of the built-in ``std::sqrt``

|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
repeat
------
Fills the output array with repeated copies of the input array.
src: input array to replicate.
dst: output array of the same type as ``src``.
ny: Flag to specify how many times the ``src`` is repeated along the vertical axis.
nx: Flag to specify how many times the ``src`` is repeated along the horizontal axis.
The functions
:ocv:func:`repeat` duplicate the input array one or more times along each of the two axes:
dst _{ij}= src _{i mod src.rows, j mod src.cols}
|
|
ny int |
|
|
nx int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
reduce
------
Reduces a matrix to a vector.
src: input 2D matrix.
dst: output vector. Its size and type is defined by ``dim`` and ``dtype`` parameters.
dim: dimension index along which the matrix is reduced. 0 means that the matrix is reduced to a single row. 1 means that the matrix is reduced to a single column.
rtype: reduction operation that could be one of the following:
* **CV_REDUCE_SUM**: the output is the sum of all rows/columns of the matrix.
* **CV_REDUCE_AVG**: the output is the mean vector of all rows/columns of the matrix.
* **CV_REDUCE_MAX**: the output is the maximum (column/row-wise) of all rows/columns of the matrix.
* **CV_REDUCE_MIN**: the output is the minimum (column/row-wise) of all rows/columns of the matrix.
The output vector will have the same type as the input matrix.
The function ``reduce`` reduces the matrix to a vector by treating the matrix rows/columns as a set of 1D vectors and performing the specified operation on the vectors until a single row/column is obtained. For example, the function can be used to compute horizontal and vertical projections of a raster image. In case of ``CV_REDUCE_SUM`` and ``CV_REDUCE_AVG`` , the output may have a larger element bit-depth to preserve accuracy. And multi-channel arrays are also supported in these two reduction modes.
|
|
dim int |
|
|
rtype int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
pow
---
Raises every array element to a power.
src: input array.
power: exponent of power.
dst: output array of the same size and type as ``src``.
The function ``pow`` raises every element of the input array to ``power`` :
dst(I) = { src(I)^power if power is integer
{|src(I)|^power otherwise
So, for a non-integer power exponent, the absolute values of input array elements are used. However, it is possible to get true values for negative values using some extra operations. In the example below, computing the 5th root of array ``src`` shows: ::
Mat mask = src < 0;
pow(src, 1./5, dst);
subtract(Scalar::all(0), dst, dst, mask);
For some values of ``power`` , such as integer values, 0.5 and -0.5, specialized faster algorithms are used.
Special values (NaN, Inf) are not handled.
|
|
power double |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
normalize
src : input array.
dst : output array of the same size as ``src`` .
alpha : norm value to normalize to or the lower range boundary in case of the range normalization.
beta : upper range boundary in case of the range normalization; it is not used for the norm normalization.
normType : normalization type (see the details below).
dtype : when negative, the output array has the same type as ``src``; otherwise, it has the same number of channels as ``src`` and the depth ``=CV_MAT_DEPTH(dtype)``.
mask : optional operation mask.
The functions ``normalize`` scale and shift the input array elements so that
||dst||{L_p}= alpha
(where p=Inf, 1 or 2) when ``normType=NORM_INF``, ``NORM_L1``, or ``NORM_L2``, respectively; or so that
min_I dst(I) = alpha, max _I dst(I) = beta
when ``normType=NORM_MINMAX`` (for dense arrays only).
The optional mask specifies a sub-array to be normalized. This means that the norm or min-n-max are calculated over the sub-array, and then this sub-array is modified to be normalized. If you want to only use the mask to calculate the norm or min-max but modify the whole array, you can use
:ocv:func:`norm` and
:ocv:func:`Mat::convertTo`.
In case of sparse matrices, only the non-zero values are analyzed and transformed. Because of this, the range transformation for sparse matrices is not allowed since it can shift the zero level.
.. seealso::
:ocv:func:`norm`,
:ocv:func:`Mat::convertTo`,
:ocv:func:`SparseMat::convertTo`
|
|
alpha double |
|
|
beta double |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
mask |
|
|
dst |
|
|
normType int |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
norm
----
Calculates an absolute array norm, an absolute difference norm, or a relative difference norm.
src: first input array.
normType: type of the norm (see the details below).
mask: optional operation mask; it must have the same size as ``src`` and ``CV_8UC1`` type.
The functions ``norm`` calculate an absolute norm of ``src``:
.. math::
norm = \forkthree{\|\texttt{src1}\|_{L_{\infty}} = \max _I | \texttt{src1} (I)|}{if $\texttt{normType} = \texttt{NORM\_INF}$ }
{ \| \texttt{src1} \| _{L_1} = \sum _I | \texttt{src1} (I)|}{if $\texttt{normType} = \texttt{NORM\_L1}$ }
{ \| \texttt{src1} \| _{L_2} = \sqrt{\sum_I \texttt{src1}(I)^2} }{if $\texttt{normType} = \texttt{NORM\_L2}$ }
The functions ``norm`` return the calculated norm.
When the ``mask`` parameter is specified and it is not empty, the norm is calculated only over the region specified by the mask.
A multi-channel input arrays are treated as a single-channel, that is, the results for all channels are combined.

|
|
normType int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
value double |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
mulTransposed
src : input single-channel matrix. Note that unlike :ocv:func:`gemm`, the function can multiply not only floating-point matrices.
dst : output square matrix.
aTa : Flag specifying the multiplication ordering. See the description below.
delta : Optional delta matrix subtracted from ``src`` before the multiplication. When the matrix is empty ( ``delta=noArray()`` ), it is assumed to be zero, that is, nothing is subtracted. If it has the same size as ``src`` , it is simply subtracted. Otherwise, it is "repeated" (see :ocv:func:`repeat` ) to cover the full ``src`` and then subtracted. Type of the delta matrix, when it is not empty, must be the same as the type of created output matrix. See the ``dtype`` parameter description below.
scale : Optional scale factor for the matrix product.
dtype : Optional type of the output matrix. When it is negative, the output matrix will have the same type as ``src`` . Otherwise, it will be ``type=CV_MAT_DEPTH(dtype)`` that should be either ``CV_32F`` or ``CV_64F`` .
The function ``mulTransposed`` calculates the product of ``src`` and its transposition:
dst = scale ( src - delta )^T ( src -delta )
if ``aTa=true`` , and
dst = scale ( src - delta ) ( src - delta )^T
otherwise. The function is used to calculate the covariance matrix. With zero delta, it can be used as a faster substitute for general matrix product ``A*B`` when ``B=A'``
.. seealso::
:ocv:func:`calcCovarMatrix`,
:ocv:func:`gemm`,
:ocv:func:`repeat`,
:ocv:func:`reduce`
|
|
aTa |
|
|
delta int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
scale |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
multiply
src1 : first input array.
src2 : second input array of the same size and the same type as ``src1``.
dst : output array of the same size and type as ``src1``.
scale : optional scale factor.
The function ``multiply`` calculates the per-element product of two arrays:
dst(I) = saturate ( scale * src1 (I) * src2(I))
There is also a :ref:`MatrixExpressions` -friendly variant of the first function. See
:ocv:func:`Mat::mul` .
For a not-per-element matrix product, see
:ocv:func:`gemm` .
.. note:: Saturation is not applied when the output array has the depth ``CV_32S``. You may even get result of an incorrect sign in the case of overflow.
.. seealso::
:ocv:func:`add`,
:ocv:func:`subtract`,
:ocv:func:`divide`,
:ref:`MatrixExpressions`,
:ocv:func:`scaleAdd`,
:ocv:func:`addWeighted`,
:ocv:func:`accumulate`,
:ocv:func:`accumulateProduct`,
:ocv:func:`accumulateSquare`,
:ocv:func:`Mat::convertTo`
|
|
scale double |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src1 |
|
|
src2 |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
min
---
Calculates per-element minimum of two arrays or an array and a scalar.
:param src1: first input array.
:param src2: second input array of the same size and type as ``src1``.
:param value: real scalar value.
:param dst: output array of the same size and type as ``src1``.
The functions ``min`` calculate the per-element minimum of two arrays:
dst(I)= min (src1 (I), src2 (I))
or array and a scalar:
dst(I)= min ( src1 (I), value )
In the second variant, when the input array is multi-channel, each channel is compared with ``value`` independently.
The first three variants of the function listed above are actually a part of
:ref:`MatrixExpressions` . They return the expression object that can be further either transformed/assigned to a matrix, or passed to a function, and so on.
|
|
src2 double |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src1 |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
min
---
Calculates per-element minimum of two arrays or an array and a scalar.
:param src1: first input array.
:param src2: second input array of the same size and type as ``src1``.
:param value: real scalar value.
:param dst: output array of the same size and type as ``src1``.
The functions ``min`` calculate the per-element minimum of two arrays:
dst(I)= min (src1 (I), src2 (I))
or array and a scalar:
dst(I)= min ( src1 (I), value )
In the second variant, when the input array is multi-channel, each channel is compared with ``value`` independently.
The first three variants of the function listed above are actually a part of
:ref:`MatrixExpressions` . They return the expression object that can be further either transformed/assigned to a matrix, or passed to a function, and so on.
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src1 |
|
|
src2 |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
meanStdDev
src : input array that should have from 1 to 4 channels so that the results can be stored in :ocv:class:`Scalar_` 's.
mean : output parameter: calculated mean value.
stddev : output parameter: calculateded standard deviation.
mask : optional operation mask.
The function ``meanStdDev`` calculates the mean and the standard deviation ``M`` of array elements independently for each channel and returns it via the output parameters:
N = sum_{I,mask (I) =/=0 } 1
mean _c = ( sum_{ I: mask(I) =/= 0} src (I)_c ) / N
stddev _c = sqrt(sum_{ I: mask(I) =/= 0} (src(I)_c - mean _c )^2 / N )
When all the mask elements are 0's, the functions return ``mean=stddev=Scalar::all(0)`` .
.. note:: The calculated standard deviation is only the diagonal of the complete normalized covariance matrix. If the full matrix is needed, you can reshape the multi-channel array ``M x N`` to the single-channel array ``M*N x mtx.channels()`` (only possible when the matrix is continuous) and then pass the matrix to :ocv:func:`calcCovarMatrix` .
.. seealso::
:ocv:func:`countNonZero`,
:ocv:func:`mean`,
:ocv:func:`norm`,
:ocv:func:`minMaxLoc`,
:ocv:func:`calcCovarMatrix`

|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
mask |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Mean |
|
|
v0 |
|
|
v1 |
|
|
v2 |
|
|
v3 |
|
|
Std |
|
|
v0 |
|
|
v1 |
|
|
v2 |
|
|
v3 |
mean
----
Calculates an average (mean) of array elements.
:param src: input array that should have from 1 to 4 channels so that the result can be stored in :ocv:class:`Scalar_` .
:param mask: optional operation mask.
The function ``mean`` calculates the mean value ``M`` of array elements, independently for each channel, and return it:
N = sum _{I: mask(I) =/= 0} 1
M_c = ( sum _{I: mask(I) =/= 0} mtx(I)_c) /N
When all the mask elements are 0's, the functions return ``Scalar::all(0)`` .

|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
mask |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Mean |
|
|
v0 |
|
|
v1 |
|
|
v2 |
|
|
v3 |
|
|
Scalar out |
max
---
Calculates per-element maximum of two arrays or an array and a scalar.
:param src1: first input array.
:param src2: second input array of the same size and type as ``src1`` .
:param value: real scalar value.
:param dst: output array of the same size and type as ``src1``.
The functions ``max`` calculate the per-element maximum of two arrays:
dst(I)= max (src1(I), src2(I))
or array and a scalar:
dst(I)= max (src1(I), value)
In the second variant, when the input array is multi-channel, each channel is compared with ``value`` independently.
|
|
src2 double |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src1 |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
max
---
Calculates per-element maximum of two arrays or an array and a scalar.
:param src1: first input array.
:param src2: second input array of the same size and type as ``src1`` .
:param value: real scalar value.
:param dst: output array of the same size and type as ``src1``.
The functions ``max`` calculate the per-element maximum of two arrays:
dst(I)= max (src1(I), src2(I))
or array and a scalar:
dst(I)= max (src1(I), value)
In the second variant, when the input array is multi-channel, each channel is compared with ``value`` independently.
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src1 |
|
|
src2 |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
magnitude
x : floating-point array of x-coordinates of the vectors.
y : floating-point array of y-coordinates of the vectors; it must have the same size as ``x``.
magnitude : output array of the same size and type as ``x``.
The function ``magnitude`` calculates the magnitude of 2D vectors formed from the corresponding elements of ``x`` and ``y`` arrays:
dst (I) = sqrt(x(I)^2 + y(I)^2)
See also:
:ocv:func:`cartToPolar`,
:ocv:func:`polarToCart`,
:ocv:func:`phase`,
:ocv:func:`sqrt`
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
x |
|
|
dst |
|
|
y |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
LUT
---
Performs a look-up table transform of an array.
:param src: input array of 8-bit elements.
:param lut: look-up table of 256 elements; in case of multi-channel input array, the table should either have a single channel (in this case the same table is used for all channels) or the same number of channels as in the input array.
:param dst: output array of the same size and number of channels as ``src``, and the same depth as ``lut``.
The function ``LUT`` fills the output array with values from the look-up table. Indices of the entries are taken from the input array. That is, the function processes each element of ``src`` as follows:
dst(I) <- lut(src(I) + d)
where
d = { 0 if src has depth CV\_8U
{ 128 if src has depth CV\_8S
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
LUT |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
log
---
Calculates the natural logarithm of every array element.
:param src: input array.
:param dst: output array of the same size and type as ``src`` .
The function ``log`` calculates the natural logarithm of the absolute value of every element of the input array:
dst (I) = {log |src(I)| if src(I) =/= 0
{ C otherwise
where ``C`` is a large negative number (about -700 in the current implementation).
The maximum relative error is about ``7e-6`` for single-precision input and less than ``1e-10`` for double-precision input. Special values (NaN, Inf) are not handled.

|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
invert
------
Finds the inverse or pseudo-inverse of a matrix.
:param src: input floating-point ``M x N`` matrix.
:param dst: output matrix of ``N x M`` size and the same type as ``src``.
:param flags: inversion method :
* **DECOMP_LU** Gaussian elimination with the optimal pivot element chosen.
* **DECOMP_SVD** singular value decomposition (SVD) method.
* **DECOMP_CHOLESKY** Cholesky decomposition; the matrix must be symmetrical and positively defined.
The function ``invert`` inverts the matrix ``src`` and stores the result in ``dst`` .
When the matrix ``src`` is singular or non-square, the function calculates the pseudo-inverse matrix (the ``dst`` matrix) so that ``norm(src*dst - I)`` is minimal, where I is an identity matrix.
In case of the ``DECOMP_LU`` method, the function returns non-zero value if the inverse has been successfully calculated and 0 if ``src`` is singular.
In case of the ``DECOMP_SVD`` method, the function returns the inverse condition number of ``src`` (the ratio of the smallest singular value to the largest singular value) and 0 if ``src`` is singular. The SVD method calculates a pseudo-inverse matrix if ``src`` is singular.
Similarly to ``DECOMP_LU`` , the method ``DECOMP_CHOLESKY`` works only with non-singular square matrices that should also be symmetrical and positively defined. In this case, the function stores the inverted matrix in ``dst`` and returns non-zero. Otherwise, it returns 0.
|
|
flags int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
function return double |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
exp
---
Calculates the exponent of every array element.
:param src: input array.
:param dst: output array of the same size and type as ``src``.
The function ``exp`` calculates the exponent of every element of the input array:
dst [I] = e^( src(I) )
The maximum relative error is about ``7e-6`` for single-precision input and less than ``1e-10`` for double-precision input. Currently, the function converts denormalized values to zeros on output. Special values (NaN, Inf) are not handled.

|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
eigen
-----
Calculates eigenvalues and eigenvectors of a symmetric matrix.
:param src: input matrix that must have ``CV_32FC1`` or ``CV_64FC1`` type, square size and be symmetrical (``src`` :sup:`T` == ``src``).
:param eigenvalues: output vector of eigenvalues of the same type as ``src``; the eigenvalues are stored in the descending order.
:param eigenvectors: output matrix of eigenvectors; it has the same size and type as ``src``; the eigenvectors are stored as subsequent matrix rows, in the same order as the corresponding eigenvalues.
The functions ``eigen`` calculate just eigenvalues, or eigenvalues and eigenvectors of the symmetric matrix ``src`` :
src*eigenvectors.row(i).t() = eigenvalues.at
.. note:: in the new and the old interfaces different ordering of eigenvalues and eigenvectors parameters is used.
.. seealso:: :ocv:func:`completeSymm` , :ocv:class:`PCA`

|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
eigenvalues |
|
|
eigenvectors |
|
|
function return |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
eigenvalues out |
|
|
eigenvectors |
determinant
-----------
Returns the determinant of a square floating-point matrix.
:param mtx: input matrix that must have ``CV_32FC1`` or ``CV_64FC1`` type and square size.
:param mat: input matrix that must have ``CV_32FC1`` or ``CV_64FC1`` type and square size.
The function ``determinant`` calculates and returns the determinant of the specified matrix. For small matrices ( ``mtx.cols=mtx.rows<=3`` ),
the direct method is used. For larger matrices, the function uses LU factorization with partial pivoting.
For symmetric positively-determined matrices, it is also possible to use :ocv:func:`eigen` decomposition to calculate the determinant.
.. seealso::
:ocv:func:`trace`,
:ocv:func:`invert`,
:ocv:func:`solve`,
:ocv:func:`eigen`,
:ref:`MatrixExpressions`

|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
mtx |
|
|
function return double |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
divide
------
Performs per-element division of two arrays or a scalar by an array.
:param src1: first input array.
:param src2: second input array of the same size and type as ``src1``.
:param scale: scalar factor.
:param dst: output array of the same size and type as ``src2``.
The functions ``divide`` divide one array by another:
dst(I) = saturate(src1(I)*scale/src2(I))
or a scalar by an array when there is no ``src1`` :
dst(I) = saturate(scale/src2(I))
When ``src2(I)`` is zero, ``dst(I)`` will also be zero. Different channels of multi-channel arrays are processed independently.
.. note:: Saturation is not applied when the output array has the depth ``CV_32S``. You may even get result of an incorrect sign in the case of overflow.
.. seealso::
:ocv:func:`multiply`,
:ocv:func:`add`,
:ocv:func:`subtract`,
:ref:`MatrixExpressions`
|
|
scale double |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src1 |
|
|
src2 |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
dft
---
Performs a forward or inverse Discrete Fourier transform of a 1D or 2D floating-point array.
:param src: input array that could be real or complex.
:param dst: output array whose size and type depends on the ``flags`` .
:param flags: transformation flags, representing a combination of the following values:
* **DFT_INVERSE** performs an inverse 1D or 2D transform instead of the default forward transform.
* **DFT_SCALE** scales the result: divide it by the number of array elements. Normally, it is combined with ``DFT_INVERSE``.
* **DFT_ROWS** performs a forward or inverse transform of every individual row of the input matrix; this flag enables you to transform multiple vectors simultaneously and can be used to decrease the overhead (which is sometimes several times larger than the processing itself) to perform 3D and higher-dimensional transformations and so forth.
* **DFT_COMPLEX_OUTPUT** performs a forward transformation of 1D or 2D real array; the result, though being a complex array, has complex-conjugate symmetry (*CCS*, see the function description below for details), and such an array can be packed into a real array of the same size as input, which is the fastest option and which is what the function does by default; however, you may wish to get a full complex array (for simpler spectrum analysis, and so on) - pass the flag to enable the function to produce a full-size complex output array.
* **DFT_REAL_OUTPUT** performs an inverse transformation of a 1D or 2D complex array; the result is normally a complex array of the same size, however, if the input array has conjugate-complex symmetry (for example, it is a result of forward transformation with ``DFT_COMPLEX_OUTPUT`` flag), the output is a real array; while the function itself does not check whether the input is symmetrical or not, you can pass the flag and then the function will assume the symmetry and produce the real output array (note that when the input is packed into a real array and inverse transformation is executed, the function treats the input as a packed complex-conjugate symmetrical array, and the output will also be a real array).
:param nonzeroRows: when the parameter is not zero, the function assumes that only the first ``nonzeroRows`` rows of the input array (``DFT_INVERSE`` is not set) or only the first ``nonzeroRows`` of the output array (``DFT_INVERSE`` is set) contain non-zeros, thus, the function can handle the rest of the rows more efficiently and save some time; this technique is very useful for calculating array cross-correlation or convolution using DFT.
The function performs one of the following:
*
Forward the Fourier transform of a 1D vector of ``N`` elements:
Y = F^(N) * X,
where
F_jk^(N)=exp(-2\pi * i * j * k/N) and i=sqrt{-1}
*
Inverse the Fourier transform of a 1D vector of ``N`` elements:
X'= (F^(N) )^(-1) * Y = (F^(N) )^(*) * y
X = (1/N) * X,
where
F^(*)=(Re(F^(N))-Im(F^(N)))^T
*
Forward the 2D Fourier transform of a ``M x N`` matrix:
Y = F^(M) * X * F^(N)
*
Inverse the 2D Fourier transform of a ``M x N`` matrix:
X'= (F^(M))^(*) * Y * (F^(N))^(*)
X = (1/(M * N)) * X'
In case of real (single-channel) data, the output spectrum of the forward Fourier transform or input spectrum of the inverse Fourier transform can be represented in a packed format called *CCS* (complex-conjugate-symmetrical). It was borrowed from IPL (Intel* Image Processing Library).
In case of 1D transform of a real vector, the output looks like the first row of the matrix above.
So, the function chooses an operation mode depending on the flags and size of the input array:
*
If DFT_ROWS is set or the input array has a single row or single column, the function performs a 1D forward or inverse transform of each row of a matrix when DFT_ROWS is set. Otherwise, it performs a 2D transform.
*
If the input array is real and DFT_INVERSE is not set, the function performs a forward 1D or 2D transform:
*When DFT_COMPLEX_OUTPUT is set, the output is a complex matrix of the same size as input.
*When DFT_COMPLEX_OUTPUT is not set, the output is a real matrix of the same size as input. In case of 2D transform, it uses the packed format as shown above. In case of a single 1D transform, it looks like the first row of the matrix above. In case of multiple 1D transforms (when using the DFT_ROWS flag), each row of the output matrix looks like the first row of the matrix above.
*
If the input array is complex and either DFT_INVERSE or DFT_REAL_OUTPUT are not set, the output is a complex array of the same size as input. The function performs a forward or inverse 1D or 2D transform of the whole input array or each row of the input array independently, depending on the flags DFT_INVERSE and DFT_ROWS.
*
When DFT_INVERSE is set and the input array is real, or it is complex but DFT_REAL_OUTPUT is set, the output is a real array of the same size as input. The function performs a 1D or 2D inverse transformation of the whole input array or each individual row, depending on the flags DFT_INVERSE and DFT_ROWS.
If DFT_SCALE is set, the scaling is done after the transformation.
Unlike dct() , the function supports arrays of arbitrary size. But only those arrays are processed efficiently, whose sizes can be factorized in a product of small prime numbers (2, 3, and 5 in the current implementation). Such an efficient DFT size can be calculated using the getOptimalDFTSize() method.
|
|
flags int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
INVERSE |
|
|
flags 2 int |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst |
dct
---
Performs a forward or inverse discrete Cosine transform of 1D or 2D array.
:param src: input floating-point array.
:param dst: output array of the same size and type as ``src`` .
:param flags: transformation flags as a combination of the following values:
* **DCT_INVERSE** performs an inverse 1D or 2D transform instead of the default forward transform.
* **DCT_ROWS** performs a forward or inverse transform of every individual row of the input matrix. This flag enables you to transform multiple vectors simultaneously and can be used to decrease the overhead (which is sometimes several times larger than the processing itself) to perform 3D and higher-dimensional transforms and so forth.
The function ``dct`` performs a forward or inverse discrete Cosine transform (DCT) of a 1D or 2D floating-point array:
*
Forward Cosine transform of a 1D vector of ``N`` elements:
Y = C^(N) * X
where
C_jk^(N)= sqrt{alpha_j/N} * cos ( pi(2k+1)j/(2N) )
and
alpha_0=1, alpha_j=2 for *j > 0*.
*
Inverse Cosine transform of a 1D vector of ``N`` elements:
X = (C^(N) )^{-1} * Y = (C^(N) )^T * Y
(since
C^{(N)} is an orthogonal matrix,
C^(N) * (C^(N))^T = I )
*
Forward 2D Cosine transform of ``M x N`` matrix:
Y = C^(N) * X * (C^(N))^T
*
Inverse 2D Cosine transform of ``M x N`` matrix:
X = (C^(N))^T * X * C^(N)
The function chooses the mode of operation by looking at the flags and size of the input array:
*
If ``(flags & DCT_INVERSE) == 0`` , the function does a forward 1D or 2D transform. Otherwise, it is an inverse 1D or 2D transform.
*
If ``(flags & DCT_ROWS) != 0`` , the function performs a 1D transform of each row.
*
If the array is a single column or a single row, the function performs a 1D transform.
*
If none of the above is true, the function performs a 2D transform.
.. note::
Currently ``dct`` supports even-size arrays (2, 4, 6 ...). For data analysis and approximation, you can pad the array when necessary.
Also, the function performance depends very much, and not monotonically, on the array size (see
:ocv:func:`getOptimalDFTSize` ). In the current implementation DCT of a vector of size ``N`` is calculated via DFT of a vector of size ``N/2`` . Thus, the optimal DCT size ``N1 >= N`` can be calculated as: ::
size_t getOptimalDCTSize(size_t N) { return 2*getOptimalDFTSize((N+1)/2); }
N1 = getOptimalDCTSize(N);
.. seealso:: :ocv:func:`dft` , :ocv:func:`getOptimalDFTSize` , :ocv:func:`idct`
|
|
flags int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
dst |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst |
countNonZero
src : single-channel array.
The function returns the number of non-zero elements in ``src`` :
.. seealso::
:ocv:func:`mean`,
:ocv:func:`meanStdDev`,
:ocv:func:`norm`,
:ocv:func:`minMaxLoc`,
:ocv:func:`calcCovarMatrix`

|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
count |
compare
Performs the per-element comparison of two arrays or an array and scalar value.
src1 : first input array , it must have a single channel.
src2 : second input array or a scalar ,when it is an array, it must have a single channel. To input a scalar you may input a 1X1 array with the required scalar value.
dst : output array that has the same size as the input arrays and type= ``CV_8UC1`` .
cmpop : a flag, that specifies correspondence between the arrays:
* **CMP_EQ** ``src1`` is equal to ``src2``.
* **CMP_GT** ``src1`` is greater than ``src2``.
* **CMP_GE** ``src1`` is greater than or equal to ``src2``.
* **CMP_LT** ``src1`` is less than ``src2``.
* **CMP_LE** ``src1`` is less than or equal to ``src2``.
* **CMP_NE** ``src1`` is unequal to ``src2``.
The function compares:
*
Elements of two arrays when ``src1`` and ``src2`` have the same size:
dst(I) = src1(I) cmpop src2(I)
*
Elements of ``src1`` with a scalar ``src2`` when ``src2`` is constructed from ``Scalar`` or has a single element:
dst(I) = src1(I) cmpop src2
*
``src1`` with elements of ``src2`` when ``src1`` is constructed from ``Scalar`` or has a single element:
dst (I) = src1 cmpop src2(I)
When the comparison result is true, the corresponding element of output array is set to 255.
The comparison operations can be replaced with the equivalent matrix expressions: ::
Mat dst1 = src1 >= src2;
Mat dst2 = src1 < 8;
...
.. seealso::
:ocv:func:`checkRange`,
:ocv:func:`min`,
:ocv:func:`max`,
:ocv:func:`threshold`,
:ref:`MatrixExpressions`
|
|
cmpop int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src1 |
|
|
dst |
|
|
src2 |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
polarToCart
Calculates x and y coordinates of 2D vectors from their magnitude and angle.
x : output array of x-coordinates of 2D vectors; it has the same size and type as angle.
y : output array of y-coordinates of 2D vectors; it has the same size and type as angle.
magnitude : input floating-point array of magnitudes of 2D vectors; it can be an empty matrix (=Mat()), in this case, the function assumes that all the magnitudes are =1; if it is not empty, it must have the same size and type as angle.
angle : input floating-point array of angles of 2D vectors (in radians).
The function polarToCart calculates the Cartesian coordinates of each 2D vector represented by the corresponding elements of magnitude and angle :
x(I) = magnitude(I) cos(angle(I))
y(I) = magnitude (I) sin(angle(I))
The relative accuracy of the estimated coordinates is about 1e-6.
.. seealso::
cartToPolar(), magnitude(), phase(), exp(), log(), pow(), sqrt()
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
x |
|
|
y |
|
|
magnitude |
|
|
angle |
|
|
ad |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
x out |
|
|
y out |
cartToPolar
x : array of x-coordinates; this must be a single-precision or double-precision floating-point array.
y : array of y-coordinates, that must have the same size and same type as ``x``.
magnitude : output array of magnitudes of the same size and type as ``x``.
angle : output array of angles that has the same size and type as ``x``; the angles are measured in radians (from 0 to 2*Pi).
The function ``cartToPolar`` calculates either the magnitude, angle, or both for every 2D vector (x(I),y(I)):
magnitude (I)= sqrt{{x(I)^2+y(I)^2} ,
angle (I)= atan2 (y(I), x(I))[*180/pi]
The angles are calculated with accuracy about 0.3 degrees (about 0.005 rad). For the point (0,0), the angle is set to 0.
.. seealso::
Sobel(), Scharr()
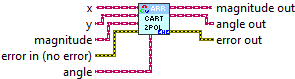
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
x |
|
|
y |
|
|
magnitude |
|
|
angle |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
magnitude out |
|
|
angle out |
bitwise_not
Inverts every bit of an array.
:param src1: input array.
:param dst: output array that has the same size and type as the input array.
:param mask: optional operation mask, 8-bit single channel array, that specifies elements of the output array to be changed.
The function calculates per-element bit-wise inversion of the input array:
dst (I) = (neg)src (I)
In case of a floating-point input array, its machine-specific bit representation (usually IEEE754-compliant) is used for the operation. In case of multi-channel arrays, each channel is processed independently.
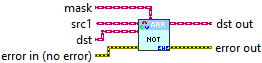
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src1 |
|
|
dst |
|
|
mask |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
bitwise_xor
-----------
Calculates the per-element bit-wise "exclusive or" operation on two arrays or an array and a scalar.
:param src1: first input array.
:param src2: second input array.
:param dst: output array that has the same size and type as the input arrays.
:param mask: optional operation mask, 8-bit single channel array, that specifies elements of the output array to be changed.
The function calculates the per-element bit-wise logical "exclusive-or" operation for Two arrays when ``src1`` and ``src2`` have the same size:
dst (I) = src1 (I) (oplus) src2 (I) if mask} (I) =/=0
In case of floating-point arrays, their machine-specific bit representations (usually IEEE754-compliant) are used for the operation. In case of multi-channel arrays, each channel is processed independently. In the 2nd and 3rd cases above, the scalar is first converted to the array type.
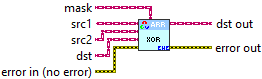
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src1 |
|
|
src2 |
|
|
dst |
|
|
mask |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
bitwise_or
Calculates the per-element bit-wise disjunction of two arrays or an array and a scalar.
:param src1: first input array .
:param src2: second input array.
:param dst: output array that has the same size and type as the input arrays.
:param mask: optional operation mask, 8-bit single channel array, that specifies elements of the output array to be changed.
The function calculates the per-element bit-wise logical disjunction for two arrays when ``src1`` and ``src2`` have the same size:
dst (I) = src1 (I) \/ src2} (I) if mask (I) =/=0
In case of floating-point arrays, their machine-specific bit representations (usually IEEE754-compliant) are used for the operation. In case of multi-channel arrays, each channel is processed independently. In the second and third cases above, the scalar is first converted to the array type.

|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src1 |
|
|
src2 |
|
|
dst |
|
|
mask |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
bitwise_and
Calculates the per-element bit-wise conjunction of two arrays or an array and a scalar.
:param src1: first input array .
:param src2: second input array.
:param dst: output array that has the same size and type as the input arrays.
:param mask: optional operation mask, 8-bit single channel array, that specifies elements of the output array to be changed.
The function calculates the per-element bit-wise logical conjunction for two arrays when src1 and src2 have the same size:
dst (I) = src1 (I) /\ src2} (I) if mask} (I) =/=0
In case of floating-point arrays, their machine-specific bit representations (usually IEEE754-compliant) are used for the operation. In case of multi-channel arrays, each channel is processed independently. In the second and third cases above, the scalar is first converted to the array type.
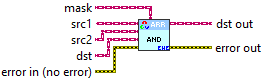
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src1 |
|
|
src2 |
|
|
dst |
|
|
mask |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
Calculates the per-element sum of two arrays or an array and a scalar.
Parameters:
src1 � first input array .
src2 � second input array or a scalar.
dst � output array that has the same size and number of channels as the input array(s); the depth is defined by dtype or src1/src2.
mask � optional operation mask - 8-bit single channel array, that specifies elements of the output array to be changed.
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
src1 |
|
|
src2 |
|
|
dst |
|
|
mask |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
absdiff
Calculates the per-element absolute difference between two arrays or between an array and a scalar.
:param src1: first input array.
:param src2: second input array or a scalar.
:param dst: output array that has the same size and type as input arrays.
The function ``absdiff`` calculates:
*
Absolute difference between two arrays when they have the same size and type:
dst(I) = saturate (|src1(I) - src2(I)|)
*
Absolute difference between an array and a scalar when the second array is constructed from ``Scalar`` or has as many elements as the number of channels in ``src1``:
dst(I) = saturate (|src1(I) - src2|)
*
Absolute difference between a scalar and an array when the first array is constructed from ``Scalar`` or has as many elements as the number of channels in ``src2``:
dst(I) = saturate (|src1 - src2(I)|)
Where ``I`` is a multi-dimensional index of array elements. In case of multi-channel arrays, each channel is processed independently.
note:: Saturation is not applied when the arrays have the depth ``CV_32S``. You may even get a negative value in the case of overflow.
.. seealso:: :ocv:func:`abs`
|
|
src1 |
|
|
src2 |
|
|
dst |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |
abs
Calculates an absolute value of each matrix element.
``abs`` is a meta-function that is expanded to one of :ocv:func:`absdiff` or :ocv:func:`convertScaleAbs` forms:
C = abs(A-B) is equivalent to absdiff(A, B, C)
C = abs(A) is equivalent to absdiff(A, Scalar::all(0), C)
C = Mat_
The output matrix has the same size and the same type as the input one except for the last case, where C is depth=CV_8U .
dst = abs(src)
The output matrix has the same size and the same type as the input one.

|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst |
|
|
src |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
dst out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution in |
|
|
temporalAreaRadius |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution in |
|
|
tau |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution in |
|
|
Scale |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution in |
|
|
OptFlow |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution in |
|
|
lambda |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution in |
|
|
iterations |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution in |
|
|
FrameSource |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution in |
|
|
btvKernelSize |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution in |
|
|
blurSigma |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution in |
|
|
blurKernelSize |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution in |
|
|
alpha |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution in |
|
|
frame |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
SuperResolution out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
FrameSource in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
FrameSource out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
FrameSource in |
|
|
frame |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
FrameSource out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
FrameSource in |
|
|
Video |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
FrameSource out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
FrameSource in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
FrameSource out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
FrameSource in |
|
|
device |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
FrameSource out |
![OpenCV.lvlib:Size[float].lvclass:set.vi](image/OpenCV.lvlib_Size[float].lvclass_setc.png)
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Size[float] in |
|
|
size |
|
|
width |
|
|
height |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Size[float] out |
![OpenCV.lvlib:Size[float].lvclass:get.vi](image/OpenCV.lvlib_Size[float].lvclass_getc.png)
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Size[float] in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Size[float] out |
|
|
size |
|
|
width |
|
|
height |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
size in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
size out |
|
|
size |
|
|
width |
|
|
height |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
size in |
|
|
size |
|
|
width |
|
|
height |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
size out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Scalar in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Scalar out |
|
|
Scalar |
|
|
v0 |
|
|
v1 |
|
|
v2 |
|
|
v3 |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Scalar in |
|
|
Scalar |
|
|
v0 double |
|
|
v1 double |
|
|
v2 double |
|
|
v3 double |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Scalar out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
RotatedRect in |
|
|
RotatedRect |
|
|
size |
|
|
angle |
|
|
center |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
RotatedRect out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
RotatedRect in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
RotatedRect out |
|
|
RotatedRect |
|
|
size |
|
|
angle |
|
|
center |
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
RotatedRect in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
RotatedRect out |
|
|
Rect |
|
|
Rect |
|
|
x |
|
|
y |
|
|
width |
|
|
height |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
TermCriteria in |
|
|
TermCriteria |
|
|
type |
|
|
maxCount |
|
|
epsilon |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
TermCriteria out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
TermCriteria in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
TermCriteria out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Range in |
|
|
Range |
|
|
start |
|
|
end |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Range out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Range in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Range out |
|
|
Range |
|
|
start |
|
|
end |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ in |
|
|
Point |
|
|
X |
|
|
Y |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ out |
|
|
Point |
|
|
X |
|
|
Y |
![OpenCV.lvlib:Point2f.lvclass:scale[s].vi](image/OpenCV.lvlib_Point2f.lvclass_scale[s]c.png)
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ in |
|
|
a double |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ in |
|
|
Point |
|
|
X |
|
|
Y |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ out |
|
|
inside int |
clear OpenCV refernce

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ in |
|
|
Point |
|
|
X |
|
|
Y |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ out |
|
|
Point |
|
|
X |
|
|
Y |
![OpenCV.lvlib:Point.lvclass:scale[s].vi](image/OpenCV.lvlib_Point.lvclass_scale[s]c.png)
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ in |
|
|
a double |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ in |
|
|
Point |
|
|
X |
|
|
Y |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ out |
|
|
inside int |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
OpenCVclass in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
OpenCVclass out |
|
|
ptr |
clear OpenCV refernce

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
OpenCVclass in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
OpenCVclass out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
OpenCVclass in |
|
|
ptr |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
OpenCVclass out |
Import data from OpenCV to Labview

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
OpenCVclass in |
|
|
SizeOf |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
OpenCVclass out |
|
|
Array |
|
|
|
|
Type |
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
OpenCVclass in |
|
|
Scalar |
|
|
v0 double |
|
|
v1 double |
|
|
v2 double |
|
|
v3 double |
|
|
high int |
|
|
width int |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
OpenCVclass out |
download data from labview to opencv

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
OpenCVclass in |
|
|
Array |
|
|
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
OpenCVclass out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
OpenCVclass in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
OpenCVclass out |
|
|
typeID |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
dst |
|
|
src |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
dst |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
KalmanFilter in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
KalmanFilter out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
KalmanFilter in |
|
|
control |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
KalmanFilter out |
|
|
Predict Mat |
KalmanFilter
class:: KalmanFilter
Kalman filter class.
The class implements a standard Kalman filter
http://en.wikipedia.org/wiki/Kalman_filter, [Welch95]_. However, you can modify ``transitionMatrix``, ``controlMatrix``, and ``measurementMatrix`` to get an extended Kalman filter functionality. See the OpenCV sample ``kalman.cpp`` .
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
KalmanFilter in |
|
|
dynamParams int |
|
|
measureParams int |
|
|
controlParams int |
|
|
type |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
KalmanFilter out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
KalmanFilter in |
|
|
transitionMatrix |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
KalmanFilter out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
KalmanFilter in |
|
|
measurementMatrix |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
KalmanFilter out |
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
KalmanFilter in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
KalmanFilter out |
|
|
errorCovPos |
|
|
measurementNoiseCov |
|
|
processNoiseCov |
|
|
measurementMatrix |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
contours in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
contours out |
|
|
contours |
|
|
|
|
|
|
|
|
x |
|
|
y |
clear OpenCV refernce

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Contours in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Contours out |
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
DescriptorMatcher in |
|
|
descriptors1 |
|
|
descriptors2 |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
DescriptorMatcher out |
|
|
queryIdx |
|
|
|
|
trainIdx |
|
|
|
|
distance |
|
|
DescriptorMatcher
class:: DescriptorMatcher : public Algorithm
Abstract base class for matching keypoint descriptors. It has two groups
of match methods: for matching descriptors of an image with another image or
with an image set. ::
class DescriptorMatcher
{
public:
virtual ~DescriptorMatcher();
virtual void add( const vector
const vector
virtual void clear();
bool empty() const;
virtual bool isMaskSupported() const = 0;
virtual void train();
/*
* Group of methods to match descriptors from an image pair.
*/
void match( const Mat& queryDescriptors, const Mat& trainDescriptors,
vector
void knnMatch( const Mat& queryDescriptors, const Mat& trainDescriptors,
vector
const Mat& mask=Mat(), bool compactResult=false ) const;
void radiusMatch( const Mat& queryDescriptors, const Mat& trainDescriptors,
vector
const Mat& mask=Mat(), bool compactResult=false ) const;
/*
* Group of methods to match descriptors from one image to an image set.
*/
void match( const Mat& queryDescriptors, vector
const vector
void knnMatch( const Mat& queryDescriptors, vector
int k, const vector
bool compactResult=false );
void radiusMatch( const Mat& queryDescriptors, vector
float maxDistance, const vector
bool compactResult=false );
virtual void read( const FileNode& );
virtual void write( FileStorage& ) const;
virtual Ptr
static Ptr
protected:
vector
...
};
![OpenCV.lvlib:DescriptorMatcher.lvclass:DescriptorMatcher[Create].vi](image/OpenCV.lvlib_DescriptorMatcher.lvclass_DescriptorMatcher[Create]c.png)
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
DescriptorMatcher in |
|
|
MatcherType |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
DescriptorMatcher out |
DescriptorExtractor
class:: DescriptorExtractor : public Algorithm
Abstract base class for computing descriptors for image keypoints. ::
class CV_EXPORTS DescriptorExtractor
{
public:
virtual ~DescriptorExtractor();
void compute( const Mat& image, vector
Mat& descriptors ) const;
void compute( const vector
vector
virtual void read( const FileNode& );
virtual void write( FileStorage& ) const;
virtual int descriptorSize() const = 0;
virtual int descriptorType() const = 0;
static Ptr
protected:
...
};
In this interface, a keypoint descriptor can be represented as a
dense, fixed-dimension vector of a basic type. Most descriptors
follow this pattern as it simplifies computing
distances between descriptors. Therefore, a collection of
descriptors is represented as
:ocv:class:`Mat` , where each row is a keypoint descriptor.
![OpenCV.lvlib:DescriptorExtractor.lvclass:DescriptorExtractor[Create].vi](image/OpenCV.lvlib_DescriptorExtractor.lvclass_DescriptorExtractor[Create]c.png)
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
DescriptorExtractor in |
|
|
ExtractorType |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
DescriptorExtractor out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
DescriptorExtractor in |
|
|
image |
|
|
vecKeyPoint |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
DescriptorExtractor out |
|
|
descriptors |
FeatureDetector
class:: FeatureDetector : public Algorithm
Abstract base class for 2D image feature detectors. ::
class CV_EXPORTS FeatureDetector
{
public:
virtual ~FeatureDetector();
void detect( const Mat& image, vector
const Mat& mask=Mat() ) const;
void detect( const vector
vector
const vector
virtual void read(const FileNode&);
virtual void write(FileStorage&) const;
static Ptr
protected:
...
};
![OpenCV.lvlib:FeatureDetector.lvclass:FeatureDetector[Create].vi](image/OpenCV.lvlib_FeatureDetector.lvclass_FeatureDetector[Create]c.png)
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
FeatureDetector in |
|
|
detectorType |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
FeatureDetector out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
FeatureDetector in |
|
|
mask |
|
|
image |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
FeatureDetector out |
|
|
vecKeypoints |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ocl Mat in |
|
|
ptr |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ocl Mat out |
Upload Data from GPU to OpenCV Mat

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ocl Mat in |
|
|
src |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ocl Mat out |
Create OpenCL(ocl) Mat
![OpenCV.lvlib:ocl Mat.lvclass:ocl Mat[2].vi](image/OpenCV.lvlib_ocl Mat.lvclass_ocl Mat[2]c.png)
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ocl Mat in |
|
|
_rows int |
|
|
_cols int |
|
|
Type |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ocl Mat out |
Create OpenCL(ocl) Mat

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ocl Mat in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ocl Mat out |
Download Data from OpenCV mat to GPU

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ocl Mat in |
|
|
dst |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ocl Mat out |
|
|
src out |
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ocl Mat in |
|
|
SizeOf |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ocl Mat out |
|
|
Array |
|
|
|
|
Type |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
BackgroundSubtractorMOG2 in |
|
|
history int |
|
|
varThreshold double |
|
|
bShadowDetection |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
BackgroundSubtractorMOG2 out |
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
BackgroundSubtractorMOG in |
|
|
history int |
|
|
nmixtures int |
|
|
noiseSigma double |
|
|
backgroundRatio double |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
BackgroundSubtractorMOG out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
BackgroundSubtractor in |
|
|
type |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
BackgroundSubtractor out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
BackgroundSubtractor in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
BackgroundSubtractor out |
|
|
type |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
BackgroundSubtractor in |
|
|
backgroundImage |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
BackgroundSubtractor out |
|
|
backgroundImage out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
BackgroundSubtractor in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
BackgroundSubtractor out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
BackgroundSubtractor in |
|
|
image |
|
|
mask |
|
|
learningRate double |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
BackgroundSubtractor out |
|
|
mask out |
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CascadeClassifier in |
|
|
image |
|
|
scaleFactor |
|
|
minNeighbors |
|
|
minSize |
|
|
maxSize |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CascadeClassifier out |
|
|
objs |
CascadeClassifier
class:: CascadeClassifier
Cascade classifier class for object detection.
![OpenCV.lvlib:CascadeClassifier.lvclass:CascadeClassifier[Create].vi](image/OpenCV.lvlib_CascadeClassifier.lvclass_CascadeClassifier[Create]c.png)
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CascadeClassifier in |
|
|
Path |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CascadeClassifier out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Color in |
|
|
Color |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Color out |

|
|
OpenCV.lvlib:Color.lvclass |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
KeyPoint in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
KeyPoint out |
|
|
Point2f |
|
|
x |
|
|
y |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ in |
|
|
Point |
|
|
X |
|
|
Y |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ out |
|
|
Point |
|
|
X |
|
|
Y |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ in |
|
|
Point |
|
|
X |
|
|
Y |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ out |
|
|
inside int |
![OpenCV.lvlib:Point2d.lvclass:scale[s].vi](image/OpenCV.lvlib_Point2d.lvclass_scale[s]c.png)
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ in |
|
|
a double |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Point_ out |
clear OpenCV refernce

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Rect in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Rect out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Rect in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Rect out |
|
|
Cluster |
|
|
x |
|
|
y |
|
|
width |
|
|
height |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Rect in |
|
|
Cluster |
|
|
x |
|
|
y |
|
|
width |
|
|
height |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Rect out |
The structure represents the logarithmic grid range of statmodel parameters. It is used for optimizing statmodel accuracy by varying model parameters, the accuracy estimate being computed by cross-validation.
double min_val
Minimum value of the statmodel parameter.
double max_val
Maximum value of the statmodel parameter.
double step
Logarithmic step for iterating the statmodel parameter.
The grid determines the following iteration sequence of the statmodel parameter values:
(min_val, min_val*step, min\val*{step}^2, ....., min_val*{step}^n),
where n is the maximal index satisfying
min_val* step ^n < max_val
The grid is logarithmic, so step must always be greater then 1.
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvParamGrid in |
|
|
min_val |
|
|
max_val |
|
|
log_step |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvParamGrid out |
svm_type:Type of a SVM formulation. Possible values are:
* **CvSVM::C_SVC** C-Support Vector Classification. ``n``-class classification (``n`` :math:`\geq` 2), allows imperfect separation of classes with penalty multiplier ``C`` for outliers.
* **CvSVM::NU_SVC** :math:`\nu`-Support Vector Classification. ``n``-class classification with possible imperfect separation. Parameter :math:`\nu` (in the range 0..1, the larger the value, the smoother the decision boundary) is used instead of ``C``.
* **CvSVM::ONE_CLASS** Distribution Estimation (One-class SVM). All the training data are from the same class, SVM builds a boundary that separates the class from the rest of the feature space.
* **CvSVM::EPS_SVR** :math:`\epsilon`-Support Vector Regression. The distance between feature vectors from the training set and the fitting hyper-plane must be less than ``p``. For outliers the penalty multiplier ``C`` is used.
* **CvSVM::NU_SVR** :math:`\nu`-Support Vector Regression. :math:`\nu` is used instead of ``p``.
See [LibSVM]_ for details.
kernel_type:Type of a SVM kernel. Possible values are:
* **CvSVM::LINEAR** Linear kernel. No mapping is done, linear discrimination (or regression) is done in the original feature space. It is the fastest option. :math:`K(x_i, x_j) = x_i^T x_j`.
* **CvSVM::POLY** Polynomial kernel: :math:`K(x_i, x_j) = (\gamma x_i^T x_j + coef0)^{degree}, \gamma > 0`.
* **CvSVM::RBF** Radial basis function (RBF), a good choice in most cases. :math:`K(x_i, x_j) = e^{-\gamma ||x_i - x_j||^2}, \gamma > 0`.
* **CvSVM::SIGMOID** Sigmoid kernel: :math:`K(x_i, x_j) = \tanh(\gamma x_i^T x_j + coef0)`.
degree:Parameter ``degree`` of a kernel function (POLY).
gamma:Parameter :math:`\gamma` of a kernel function (POLY / RBF / SIGMOID).
coef0:Parameter ``coef0`` of a kernel function (POLY / SIGMOID).
Cvalue:Parameter ``C`` of a SVM optimization problem (C_SVC / EPS_SVR / NU_SVR).
nu:Parameter :math:`\nu` of a SVM optimization problem (NU_SVC / ONE_CLASS / NU_SVR).
p:Parameter :math:`\epsilon` of a SVM optimization problem (EPS_SVR).
class_weights:Optional weights in the C_SVC problem , assigned to particular classes. They are multiplied by ``C`` so the parameter ``C`` of class ``#i`` becomes :math:`class\_weights_i * C`. Thus these weights affect the misclassification penalty for different classes. The larger weight, the larger penalty on misclassification of data from the corresponding class.
term_crit:Termination criteria of the iterative SVM training procedure which solves a partial case of constrained quadratic optimization problem. You can specify tolerance and/or the maximum number of iterations.
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvSVMParams in |
|
|
term_crit |
|
|
class_weights |
|
|
svm_type |
|
|
kernel_type |
|
|
degree |
|
|
gamma |
|
|
coef0 |
|
|
Cvalue |
|
|
nu |
|
|
p |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvSVMParams out |
boost_type:Type of the boosting algorithm. Possible values are:
* **CvBoost::DISCRETE** Discrete AdaBoost.
* **CvBoost::REAL** Real AdaBoost. It is a technique that utilizes confidence-rated predictions and works well with categorical data(Default).
* **CvBoost::LOGIT** LogitBoost. It can produce good regression fits.
* **CvBoost::GENTLE** Gentle AdaBoost. It puts less weight on outlier data points and for that reason is often good with regression data.
Gentle AdaBoost and Real AdaBoost are often the preferable choices.
weak_count:The number of weak classifiers (Default=100).
weight_trim_rate:A threshold between 0 and 1 used to save computational time. Samples with summary weight :math:`\leq 1 - weight\_trim\_rate` do not participate in the *next* iteration of training. Set this parameter to 0 to turn off this functionality (Default=0.95).
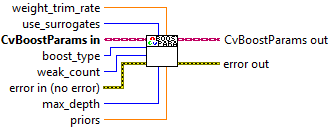
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvBoostParams in |
|
|
boost_type |
|
|
weak_count |
|
|
weight_trim_rate |
|
|
max_depth |
|
|
use_surrogates |
|
|
priors |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvBoostParams out |
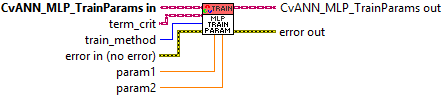
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvANN_MLP_TrainParams in |
|
|
term_crit |
|
|
train_method |
|
|
param1 |
|
|
param2 |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvANN_MLP_TrainParams out |
Trains an SVM with optimal parameters.
The method trains the SVM model automatically by choosing the optimal
parameters ``C``, ``gamma``, ``p``, ``nu``, ``coef0``, ``degree`` from
:ocv:class:`CvSVMParams`. Parameters are considered optimal
when the cross-validation estimate of the test set error
is minimal.
If there is no need to optimize a parameter, the corresponding grid step should be set to any value less than or equal to 1. For example, to avoid optimization in ``gamma``, set ``gamma_grid.step = 0``, ``gamma_grid.min_val``, ``gamma_grid.max_val`` as arbitrary numbers. In this case, the value ``params.gamma`` is taken for ``gamma``.
And, finally, if the optimization in a parameter is required but
the corresponding grid is unknown, you may call the function :ocv:func:`CvSVM::get_default_grid`. To generate a grid, for example, for ``gamma``, call ``CvSVM::get_default_grid(CvSVM::GAMMA)``.
This function works for the classification
(``params.svm_type=CvSVM::C_SVC`` or ``params.svm_type=CvSVM::NU_SVC``)
as well as for the regression
(``params.svm_type=CvSVM::EPS_SVR`` or ``params.svm_type=CvSVM::NU_SVR``). If ``params.svm_type=CvSVM::ONE_CLASS``, no optimization is made and the usual SVM with parameters specified in ``params`` is executed.
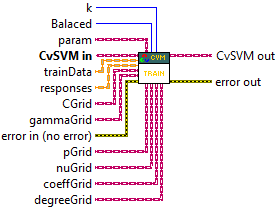
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvSVM in |
|
|
responses |
|
|
trainData |
|
|
param |
|
|
Balaced |
|
|
k |
|
|
CGrid |
|
|
gammaGrid |
|
|
pGrid |
|
|
degreeGrid |
|
|
coeffGrid |
|
|
nuGrid |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvSVM out |
Trains an SVM.
The method trains the SVM model. It follows the conventions of the generic `CvStatModel::train` approach with the following limitations:
* Only the ``CV_ROW_SAMPLE`` data layout is supported.
* Input variables are all ordered.
* Output variables can be either categorical (``params.svm_type=CvSVM::C_SVC`` or ``params.svm_type=CvSVM::NU_SVC``), or ordered (``params.svm_type=CvSVM::EPS_SVR`` or ``params.svm_type=CvSVM::NU_SVR``), or not required at all (``params.svm_type=CvSVM::ONE_CLASS``).
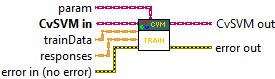
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvSVM in |
|
|
responses |
|
|
trainData |
|
|
param |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvSVM out |
Predicts the response for input sample(s).
samples: Input samples for prediction.
returnDFVal: Specifies a type of the return value. If ``true`` and the problem is 2-class classification then the method returns the decision function value that is signed distance to the margin, else the function returns a class label (classification) or estimated function value (regression).
The function is parallelized with the TBB library.
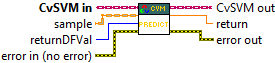
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvSVM in |
|
|
sample |
|
|
returnDFVal |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvSVM out |
|
|
return |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvSVM in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvSVM out |
update: Specifies whether the classifier needs to be updated (``true``, the new weak tree classifiers added to the existing ensemble) or the classifier needs to be rebuilt from scratch (``false``).
The train method follows the common template of :ocv:func:`CvStatModel::train`. The responses must be categorical, which means that boosted trees cannot be built for regression, and there should be two classes.
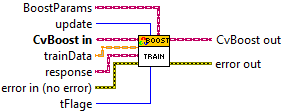
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvBoost in |
|
|
trainData |
|
|
response |
|
|
BoostParams |
|
|
tFlage |
|
|
update |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvBoost out |
Predicts a response for an input sample.
sample:Input sample.
missing:Optional mask of missing measurements. To handle missing measurements, the weak classifiers must include surrogate splits (see ``CvDTreeParams::use_surrogates``).
weak_responses:Optional output parameter, a floating-point vector with responses of each individual weak classifier. The number of elements in the vector must be equal to the slice length.
slice:Continuous subset of the sequence of weak classifiers to be used for prediction. By default, all the weak classifiers are used.
rawMode:Normally, it should be set to ``false``.
returnSum:If ``true`` then return sum of votes instead of the class label.
The method runs the sample through the trees in the ensemble and returns the output class label based on the weighted voting.
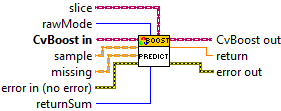
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvBoost in |
|
|
sample |
|
|
missing |
|
|
rawMode |
|
|
returnSum |
|
|
slice |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvBoost out |
|
|
return |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvBoost in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvBoost out |
Trains the model.
isRegression:Type of the problem:``true`` for regression and ``false`` for classification.
maxK:Number of maximum neighbors that may be passed to the method :ocv:func:`CvKNearest::find_nearest`.
updateBase:Specifies whether the model is trained from scratch (``update_base=false``), or it is updated using the new training data (``update_base=true``). In the latter case, the parameter ``maxK`` must not be larger than the original value.
The method trains the K-Nearest model. It follows the conventions of the generic :ocv:func:`CvStatModel::train` approach with the following limitations:
* Only ``CV_ROW_SAMPLE`` data layout is supported.
* Input variables are all ordered.
* Output variables can be either categorical ( ``is_regression=false`` ) or ordered ( ``is_regression=true`` ).
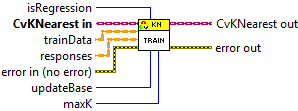
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvKNearest in |
|
|
trainData |
|
|
responses |
|
|
isRegression |
|
|
maxK |
|
|
updateBase |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvKNearest out |
Finds the neighbors and predicts responses for input vectors.
samples:Input samples stored by rows. It is a single-precision floating-point matrix of :math:`number\_of\_samples \times number\_of\_features` size.
k:Number of used nearest neighbors.
results:Vector with results of prediction (regression or classification) for each input sample. It is a single-precision floating-point vector with ``number_of_samples`` elements.
neighbors:Optional output pointers to the neighbor vectors themselves. It is an array of ``k*samples->rows`` pointers.
neighborResponses:Optional output values for corresponding ``neighbors``. It is a single-precision floating-point matrix of :math:`number\_of\_samples \times k` size.
dist:Optional output distances from the input vectors to the corresponding ``neighbors``. It is a single-precision floating-point matrix of :math:`number\_of\_samples \times k` size.
For each input vector (a row of the matrix ``samples``), the method finds the ``k`` nearest neighbors. In case of regression, the predicted result is a mean value of the particular vector's neighbor responses. In case of classification, the class is determined by voting.
For each input vector, the neighbors are sorted by their distances to the vector.
In case of C++ interface you can use output pointers to empty matrices and the function will allocate memory itself.
If only a single input vector is passed, all output matrices are optional and the predicted value is returned by the method.
The function is parallelized with the TBB library.
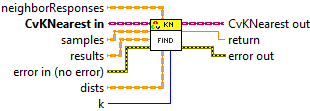
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvKNearest in |
|
|
samples |
|
|
results |
|
|
neighborResponses |
|
|
dists |
|
|
k |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvKNearest out |
|
|
return |
The algorithm caches all training samples and predicts the response for a new sample by analyzing a certain number (**K**) of the nearest neighbors of the sample using voting, calculating weighted sum, and so on. The method is sometimes referred to as "learning by example" because for prediction it looks for the feature vector with a known response that is closest to the given vector.

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvKNearest in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvKNearest out |
inputs: Floating-point matrix of input vectors, one vector per row.
outputs: Floating-point matrix of the corresponding output vectors, one vector per row.
params:: Training parameters.
flags:: Various parameters to control the training algorithm. A combination of the following parameters is possible:
* **UPDATE_WEIGHTS** Algorithm updates the network weights, rather than computes them from scratch. In the latter case the weights are initialized using the Nguyen-Widrow algorithm.
* **NO_INPUT_SCALE** Algorithm does not normalize the input vectors. If this flag is not set, the training algorithm normalizes each input feature independently, shifting its mean value to 0 and making the standard deviation equal to 1. If the network is assumed to be updated frequently, the new training data could be much different from original one. In this case, you should take care of proper normalization.
* **NO_OUTPUT_SCALE** Algorithm does not normalize the output vectors. If the flag is not set, the training algorithm normalizes each output feature independently, by transforming it to the certain range depending on the used activation function.
This method applies the specified training algorithm to computing/adjusting the network weights. It returns the number of done iterations.
The RPROP training algorithm is parallelized with the TBB library.
If you are using the default ``cvANN_MLP::SIGMOID_SYM`` activation function then the output should be in the range [-1,1], instead of [0,1], for optimal results.
CvANN_MLP::predict
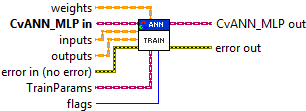
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvANN_MLP in |
|
|
flags |
|
|
inputs |
|
|
outputs |
|
|
TrainParams |
|
|
weights |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvANN_MLP out |
inputs: Input samples.
outputs Predicted responses for corresponding samples.
The method returns a dummy value which should be ignored.
If you are using the default ``cvANN_MLP::SIGMOID_SYM`` activation function with the default parameter values fparam1=0 and fparam2=0 then the function used is y = 1.7159*tanh(2/3 * x), so the output will range from [-1.7159, 1.7159], instead of [0,1].
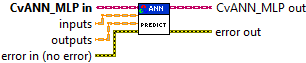
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvANN_MLP in |
|
|
outputs |
|
|
inputs |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvANN_MLP out |
Constructs MLP with the specified topology.
: layerSizes: Integer vector specifying the number of neurons in each layer including the input and output layers.
: activateFunc: Parameter specifying the activation function for each neuron: one of ``CvANN_MLP::IDENTITY``, ``CvANN_MLP::SIGMOID_SYM``, and ``CvANN_MLP::GAUSSIAN``.
: fparam1: Free parameter of the activation function, :math:`\alpha`. See the formulas in the introduction section.
: fparam2: Free parameter of the activation function, :math:`\beta`. See the formulas in the introduction section.
The method creates an MLP network with the specified topology and assigns the same activation function to all the neurons.
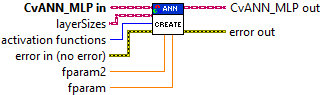
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvANN_MLP in |
|
|
layerSizes |
|
|
activation functions |
|
|
fparam |
|
|
fparam2 |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvANN_MLP out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvANN_MLP in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvANN_MLP out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvStatModel in |
|
|
File |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvStatModel out |
Loads the model from a file.

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvStatModel in |
|
|
File |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvStatModel out |
Deallocates memory and resets the model state.
The method 'clear' does the same job as the destructor: it deallocates all the memory occupied by the class members. But the object itself is not destructed and can be reused further.

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvStatModel in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
CvStatModel out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vePoints2i in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vePoints2i out |
|
|
Size |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vePoints2i in |
|
|
element |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vePoints2i out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vePoints2i in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vePoints2i out |
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vePoints2i in |
|
|
element |
|
|
pos |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vePoints2i out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vePoints in |
|
|
idx |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vePoints out |
|
|
Point2i |
|
|
x |
|
|
y |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vePoints2i in |
|
|
pos |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vePoints2i out |
clear OpenCV refernce

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vePoints2i in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vePoints2i out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vePoints2i in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vePoints2i out |
|
|
data |
|
|
OpenCV.lvlib:OpenCVclass.lvclass |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vePoints2i in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vePoints2i out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vectorPoints in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vectorPoints out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vePoints2i in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vePoints2i out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecVec2f in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecVec2f out |
|
|
Size |
clear OpenCV refernce

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecVec2f in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecVec2f out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecVec2f in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecVec2f out |
|
|
data |
|
|
OpenCV.lvlib:OpenCVclass.lvclass |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecRect in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecRect out |
|
|
Size |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecRect in |
|
|
element |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecRect out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecRect in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecRect out |
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecRect in |
|
|
element |
|
|
pos |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecRect out |
![OpenCV.lvlib:vecRect.lvclass:get[all].vi](image/OpenCV.lvlib_vecRect.lvclass_get[all]c.png)
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecRect in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecRect out |
|
|
Rects |
|
|
Obj |
|
|
x |
|
|
y |
|
|
width |
|
|
height |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecRect in |
|
|
idx |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecRect out |
|
|
Obj |
|
|
x |
|
|
y |
|
|
width |
|
|
height |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecRect in |
|
|
pos |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecRect out |
clear OpenCV refernce

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecRect in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecRect out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecRect in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecRect out |
|
|
data |
|
|
OpenCV.lvlib:OpenCVclass.lvclass |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecRect in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecRect out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecRect in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecRect out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoints2f in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoints2f out |
|
|
Size |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoints2f in |
|
|
element |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoints2f out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoints2f in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoints2f out |
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoints2f in |
|
|
element |
|
|
pos |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoints2f out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vectorPoints2f in |
|
|
idx |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vectorPoints2f out |
|
|
Point2f |
|
|
x |
|
|
y |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoints2f in |
|
|
pos |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoints2f out |
clear OpenCV refernce

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoints2f in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoints2f out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoints2f in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoints2f out |
|
|
data |
|
|
OpenCV.lvlib:OpenCVclass.lvclass |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoints2f in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoints2f out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vectorPoints2f in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vectorPoints2f out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoints2f in |
|
|
src |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoints2f out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoints2f in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoints2f out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoins in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoins out |
|
|
Size |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoins in |
|
|
element |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoins out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoins in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoins out |
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoins in |
|
|
element |
|
|
pos |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoins out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoins in |
|
|
pos |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoins out |
clear OpenCV refernce

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoins in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoins out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoins in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoins out |
|
|
data |
|
|
OpenCV.lvlib:OpenCVclass.lvclass |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoins in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoins out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vectorPoints in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vectorPoints out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoins in |
|
|
src |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoins out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoins in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecPoins out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
U8C1 in |
|
|
Array |
|
|
Numeric |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
U8C1 out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
U8C1 in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
U8C1 out |
|
|
value |
|
|
Numeric |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Vector in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Vector out |
|
|
Size |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Vector in |
|
|
element |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Vector out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Vector in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Vector out |
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Vector in |
|
|
element |
|
|
pos |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Vector out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Vector in |
|
|
pos |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Vector out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Vector in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Vector out |
|
|
data |
|
|
OpenCV.lvlib:OpenCVclass.lvclass |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Vector in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Vector out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Vector in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Vector out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecKeyPoint in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecKeyPoint out |
|
|
Size |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecKeyPoint in |
|
|
element |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecKeyPoint out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecKeyPoint in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecKeyPoint out |
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecKeyPoint in |
|
|
element |
|
|
pos |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecKeyPoint out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecKeyPoint in |
|
|
idx |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecKeyPoint out |
|
|
KeyPoint out |
|
|
location |
|
|
x |
|
|
y |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecKeyPoint in |
|
|
pos |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecKeyPoint out |
clear OpenCV refernce

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecKeyPoint in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecKeyPoint out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecKeyPoint in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecKeyPoint out |
|
|
data |
|
|
OpenCV.lvlib:OpenCVclass.lvclass |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecKeyPoint in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecKeyPoint out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecKeyPoint in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
vecKeyPoint out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
float matrix in |
|
|
Array |
|
|
Numeric |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
float matrix out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
float matrix in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
float matrix out |
|
|
value |
|
|
Numeric |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Float Matrix dst |
|
|
Mat source |
|
|
dst Type |
|
|
alfa optional scale factor |
|
|
beta optional delta added to the scaled values. |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Float Matrix dst |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Double2D Matrix in |
|
|
Array |
|
|
Numeric |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Double2D Matrix out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Double2D Matrix in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Double2D Matrix out |
|
|
value |
|
|
Numeric |
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Double Matrix dst |
|
|
Mat source |
|
|
dst Type |
|
|
alfa optional scale factor |
|
|
beta optional delta added to the scaled values. |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Double Matrix dst |
Load Gray image file

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ImageGray in |
|
|
Path |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ImageGray out |
Get Gray image

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ImageGray_8bit in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ImageGray_8bit out |
|
|
2D Picture |
|
|
output cluster |
|
|
image type |
|
|
image depth |
|
|
image |
|
|
|
|
mask |
|
|
|
|
colors |
|
|
|
|
Rectangle |
|
|
left |
|
|
top |
|
|
right |
|
|
bottom |
Create Gray image
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ImageGray_8bit in |
|
|
Scalar |
|
|
v0 double |
|
|
v1 double |
|
|
v2 double |
|
|
v3 double |
|
|
high int |
|
|
width int |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ImageGray_8bit out |
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ImageGray dst |
|
|
Mat source |
|
|
dst Type |
|
|
alfa optional scale factor |
|
|
beta optional delta added to the scaled values. |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ImageGray dst |
Load color image from file

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ImageRGB in |
|
|
path |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ImageRGB out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ImageRGB in |
|
|
insert_image |
|
|
image type |
|
|
image depth |
|
|
image |
|
|
|
|
mask |
|
|
|
|
colors |
|
|
|
|
Rectangle |
|
|
left |
|
|
top |
|
|
right |
|
|
bottom |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ImageRGB out |
Get RGB Mat image
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ImageRGB in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ImageRGB out |
|
|
2D Picture |
|
|
output cluster |
|
|
image type |
|
|
image depth |
|
|
image |
|
|
|
|
mask |
|
|
|
|
colors |
|
|
|
|
Rectangle |
|
|
left |
|
|
top |
|
|
right |
|
|
bottom |
Create RGB Mat
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ImageRGB in |
|
|
Scalar |
|
|
v0 double |
|
|
v1 double |
|
|
v2 double |
|
|
v3 double |
|
|
high int |
|
|
width int |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ImageRGB out |
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ImageRGB dst |
|
|
Mat source |
|
|
dst Type |
|
|
alfa optional scale factor |
|
|
beta optional delta added to the scaled values. |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
ImageRGB dst |
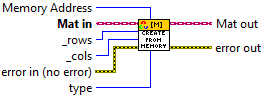
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
_rows int |
|
|
_cols int |
|
|
type |
|
|
Memory Address |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
Import data from OpenCV to Labview
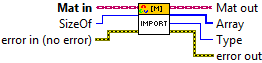
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
SizeOf |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
|
|
Array |
|
|
|
|
Type |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
ROI |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
|
|
Mat ROI |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
range |
|
|
x |
|
|
y |
|
|
width |
|
|
height |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
|
|
Mat ROI |
clear Mat refernce

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
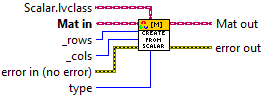
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
_rows int |
|
|
_cols int |
|
|
type |
|
|
Scalar.lvclass |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
create Mat
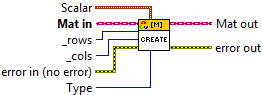
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
_rows int |
|
|
_cols int |
|
|
Type |
|
|
Scalar |
|
|
v0 double |
|
|
v1 double |
|
|
v2 double |
|
|
v3 double |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
int create_MatInitScalar(int _rows,int _cols,int _type, int _s);

|
|
mat int |
|
|
range int |
|
|
error in (no error) error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
error out error out passes error or warning information out of a VI to be used by other VIs. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source string describes the origin of the error or warning. Right-click the error out indicator on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
roi |
return row from matrix

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
y int |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
|
|
row |
return column from matrix

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
x int |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
|
|
col |
return diag matrix

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
d int |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
|
|
Diag Out |
Creates a full copy of the array and the underlying data

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
src Mat |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
reshape matrix
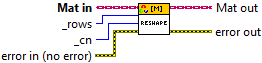
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
_cn int |
|
|
_rows int |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
Transform matrix

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
resize matrix

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
size |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
Adds elements to the bottom of the matrix.

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
nelems int |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
create zero matrix
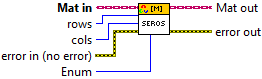
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
rows int |
|
|
cols int |
|
|
Enum |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
create one matrix
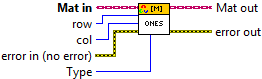
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
row |
|
|
col |
|
|
Type |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
return matrix columns

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
|
|
COLES |
return matrix rows

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
|
|
ROWS |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
Path |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
return matrix size columns and rows
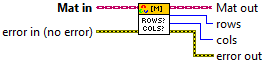
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
|
|
cols |
|
|
rows |
Copies the matrix to another one
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
CopyTo |
|
|
mask |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
imwrite
filename : Name of the file.
image : Image to be saved
params : Format-specific save parameters encoded as pairs ``paramId_1, paramValue_1, paramId_2, paramValue_2, ...`` . The following parameters are currently supported:
* For JPEG, it can be a quality ( ``CV_IMWRITE_JPEG_QUALITY`` ) from 0 to 100 (the higher is the better). Default value is 95.
* For PNG, it can be the compression level ( ``CV_IMWRITE_PNG_COMPRESSION`` ) from 0 to 9. A higher value means a smaller size and longer compression time. Default value is 3.
* For PPM, PGM, or PBM, it can be a binary format flag ( ``CV_IMWRITE_PXM_BINARY`` ), 0 or 1. Default value is 1.
The function ``imwrite`` saves the image to the specified file. The image format is chosen based on the ``filename`` extension (see
:ocv:func:`imread` for the list of extensions). Only 8-bit (or 16-bit unsigned (``CV_16U``) in case of PNG, JPEG 2000, and TIFF) single-channel or 3-channel (with 'BGR' channel order) images can be saved using this function. If the format, depth or channel order is different, use
:ocv:func:`Mat::convertTo` , and
:ocv:func:`cvtColor` to convert it before saving. Or, use the universal XML I/O functions to save the image to XML or YAML format.
It is possible to store PNG images with an alpha channel using this function. To do this, create 8-bit (or 16-bit) 4-channel image BGRA, where the alpha channel goes last. Fully transparent pixels should have alpha set to 0, fully opaque pixels should have alpha set to 255/65535. The sample below shows how to create such a BGRA image and store to PNG file. It also demonstrates how to set custom compression parameters ::
#include
#include
#include
using namespace cv;
using namespace std;
void createAlphaMat(Mat &mat)
{
for (int i = 0; i < mat.rows; ++i) {
for (int j = 0; j < mat.cols; ++j) {
Vec4b& rgba = mat.at
rgba[0] = UCHAR_MAX;
rgba[1] = saturate_cast
rgba[2] = saturate_cast
rgba[3] = saturate_cast
}
}
}
int main(int argv, char **argc)
{
// Create mat with alpha channel
Mat mat(480, 640, CV_8UC4);
createAlphaMat(mat);
vector
compression_params.push_back(CV_IMWRITE_PNG_COMPRESSION);
compression_params.push_back(9);
try {
imwrite("alpha.png", mat, compression_params);
}
catch (runtime_error& ex) {
fprintf(stderr, "Exception converting image to PNG format: %s\n", ex.what());
return 1;
}
fprintf(stdout, "Saved PNG file with alpha data.\n");
return 0;
}
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
params |
|
|
Cluster |
|
|
Ring |
|
|
val |
|
|
path |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
Locates the matrix header within a parent matrix.
Parameters:
wholeSize � Output parameter that contains the size of the whole matrix containing *this as a part.
ofs � Output parameter that contains an offset of *this inside the whole matrix.
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
|
|
wholeSize |
|
|
width |
|
|
height |
|
|
ofs |
|
|
X |
|
|
Y |
|
|
Obj.ofs |
|
|
Obj.wholeSize |
Adjusts a submatrix size and position within the parent matrix.
:param dtop: Shift of the top submatrix boundary upwards.
:param dbottom: Shift of the bottom submatrix boundary downwards.
:param dleft: Shift of the left submatrix boundary to the left.
:param dright: Shift of the right submatrix boundary to the right.
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
dtop |
|
|
dleft |
|
|
dbottom |
|
|
dright |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
|
|
2D Picture |
|
|
output cluster |
|
|
image type |
|
|
image depth |
|
|
image |
|
|
|
|
mask |
|
|
|
|
colors |
|
|
|
|
Rectangle |
|
|
left |
|
|
top |
|
|
right |
|
|
bottom |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
|
|
Size |
|
|
COLES |
|
|
ROWS |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
insert_image |
|
|
image type |
|
|
image depth |
|
|
image |
|
|
|
|
mask |
|
|
|
|
colors |
|
|
|
|
Rectangle |
|
|
left |
|
|
top |
|
|
right |
|
|
bottom |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat dst |
|
|
Mat source |
|
|
dst Type |
|
|
alfa optional scale factor |
|
|
beta optional delta added to the scaled values. |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat dst |
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
Mat out |
|
|
out |
|
|
Numeric |
|
|
Type |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VecMat in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VecMat out |
|
|
Size |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VecMat in |
|
|
element |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VecMat out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VecMat in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VecMat out |
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VecMat in |
|
|
element |
|
|
pos |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VecMat out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VecMat in |
|
|
pos |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VecMat out |
clear OpenCV refernce

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VecMat in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VecMat out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VecMat in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VecMat out |
|
|
data |
|
|
OpenCV.lvlib:OpenCVclass.lvclass |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VecMat in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VecMat out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VecMat in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VecMat out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoCapture in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoCapture out |
![OpenCV.lvlib:VideoCapture.lvclass:VideoCaptureProperty[set].vi](image/OpenCV.lvlib_VideoCapture.lvclass_VideoCaptureProperty[set]c.png)
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoCapture in |
|
|
Property |
|
|
value double |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoCapture out |
![OpenCV.lvlib:VideoCapture.lvclass:VideoCaptureProperty[Get].vi](image/OpenCV.lvlib_VideoCapture.lvclass_VideoCaptureProperty[Get]c.png)
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoCapture in |
|
|
Ring |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoCapture out |
|
|
function return double |
![OpenCV.lvlib:VideoCapture.lvclass:VideoCapture[IP].vi](image/OpenCV.lvlib_VideoCapture.lvclass_VideoCapture[IP]c.png)
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoCapture in |
|
|
address |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoCapture out |
VideoCapture
class:: VideoCapture
Class for video capturing from video files or cameras.
The class provides C++ API for capturing video from cameras or for reading video files. Here is how the class can be used: ::
#include "opencv2/opencv.hpp"
using namespace cv;
int main(int, char**)
{
VideoCapture cap(0); // open the default camera
if(!cap.isOpened()) // check if we succeeded
return -1;
Mat edges;
namedWindow("edges",1);
for(;;)
{
Mat frame;
cap >> frame; // get a new frame from camera
cvtColor(frame, edges, CV_BGR2GRAY);
GaussianBlur(edges, edges, Size(7,7), 1.5, 1.5);
Canny(edges, edges, 0, 30, 3);
imshow("edges", edges);
if(waitKey(30) >= 0) break;
}
// the camera will be deinitialized automatically in VideoCapture destructor
return 0;
}
.. note:: In C API the black-box structure ``CvCapture`` is used instead of ``VideoCapture``.
![OpenCV.lvlib:VideoCapture.lvclass:VideoCapture[File].vi](image/OpenCV.lvlib_VideoCapture.lvclass_VideoCapture[File]c.png)
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoCapture in |
|
|
filename |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoCapture out |
VideoCapture
class:: VideoCapture
Class for video capturing from video files or cameras.
The class provides C++ API for capturing video from cameras or for reading video files. Here is how the class can be used: ::
#include "opencv2/opencv.hpp"
using namespace cv;
int main(int, char**)
{
VideoCapture cap(0); // open the default camera
if(!cap.isOpened()) // check if we succeeded
return -1;
Mat edges;
namedWindow("edges",1);
for(;;)
{
Mat frame;
cap >> frame; // get a new frame from camera
cvtColor(frame, edges, CV_BGR2GRAY);
GaussianBlur(edges, edges, Size(7,7), 1.5, 1.5);
Canny(edges, edges, 0, 30, 3);
imshow("edges", edges);
if(waitKey(30) >= 0) break;
}
// the camera will be deinitialized automatically in VideoCapture destructor
return 0;
}
.. note:: In C API the black-box structure ``CvCapture`` is used instead of ``VideoCapture``.
![OpenCV.lvlib:VideoCapture.lvclass:VideoCapture[Device].vi](image/OpenCV.lvlib_VideoCapture.lvclass_VideoCapture[Device]c.png)
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoCapture in |
|
|
device |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoCapture out |
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoCapture in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoCapture out |
|
|
Height |
|
|
Width |
|
|
Frame Count |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoCapture in |
|
|
MAT |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoCapture out |
|
|
MAT out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoCapture in |
|
|
MAT |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoCapture out |
|
|
MAT out |

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoCapture in |
|
|
MAT |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoCapture out |
|
|
MAT out |
![OpenCV.lvlib:VideoWriter.lvclass:GetFOURCC[int].vi](image/OpenCV.lvlib_VideoWriter.lvclass_GetFOURCC[int]c.png)
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoWriter in |
|
|
FOURCC |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoWriter out |
|
|
FOURCC out |
VideoWriter
class:: VideoWriter
Video writer class.
![OpenCV.lvlib:VideoWriter.lvclass:VideoWriter[File].vi](image/OpenCV.lvlib_VideoWriter.lvclass_VideoWriter[File]c.png)
|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoWriter in |
|
|
fps double |
|
|
size |
|
|
width |
|
|
height |
|
|
isColor |
|
|
filename |
|
|
FOURCC |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoWriter out |
VideoWriter
class:: VideoWriter
Video writer class.

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoWriter in |
|
|
image |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoWriter out |
VideoWriter
class:: VideoWriter
Video writer class.

|
|
error in (no error) The error in cluster can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
VideoWriter in |
|
|
error out The error out cluster passes error or warning information out of a VI to be used by other VIs. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
status The status boolean is either TRUE (X) for an error, or FALSE (checkmark) for no error or a warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
code The code input identifies the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |
|
|
source The source string describes the origin of the error or warning. The pop-up option Explain Error (or Explain Warning) gives more information about the error displayed. |

































































![cOpenCV_lvlib_Size[float]lvclass](image/cOpenCV_lvlib_Size[float]lvclass.png)
![iOpenCV_lvlib_Size[float]lvclass](image/iOpenCV_lvlib_Size[float]lvclass.png)




















































































